Двигатель постоянного тока последовательного возбуждения (ДПТ ПВ)
Двигатель постоянного тока последовательного возбуждения представляет собой электрическую машину постоянного тока, в которой обмотка возбуждения подключена последовательно с обмоткой якоря. Для данного типа двигателей справедливо равенство: ток, протекающий в якорной обмотке, равен току в обмотке возбуждения I=Iв=Iя, что является его главной отличительной особенностью от остальных типов двигателей.

Рисунок 1 – Схема подключения ДПТ ПВ
Стоит обратить внимание на зависимость магнитного потока от нагрузки Ф=f(Iя). Если двигатель будет работать на 25% своей номинальной мощности или меньше, то магнитный поток будет крайне мал, что приведет к постоянному увеличению скорости вала
Препятствовать разгону будут лишь механические потери, и двигатель пойдет в “разнос”. Это приведет к быстрому выходу машины из строя. Все описанное в соответствии с формулой:
Исходя из вышесказанного, ДПТ ПВ нельзя использовать на холостом ходу, постоянно требуется контроль тока якоря. С этой целью последовательно с обмоткой возбуждения устанавливают минимальное токовое реле, которое замыкает якорную цепь только в том случае, если нагрузка на валу достаточна для поддержания номинальной работы двигателя.
Пуск двигателя производят с пусковым сопротивлением, также включенным последовательно в цепь якоря. После пуска это сопротивление выводят, и машина продолжает работать в номинальном режиме на своей естественной характеристике.
Механическая и электромеханическая характеристики ДПТ ПВ одинаковы и имеют гиперболический вид (рисунок 2).

Рисунок 2 – Механическая и электромеханическая характеристики ДПТ ПВ
Скорость вращения ротора двигателя постоянного тока с последовательным возбуждением производится регулированием двух параметров:
| – питающее напряжение; | ||
| – магнитный поток полюсов двигателя. |
Для изменения скорости при помощи входного напряжения, в роторную цепь вводят специальное добавочное сопротивление, или же можно использовать пусковой реостат и для этой цели. Но следует заметить, данный способ является крайне неэкономичным и нецелесообразным, так как большое количество энергии будет рассеиваться на реостате.
Регулировка скорости изменением магнитного потока, осуществляется включением реостата параллельно обмотке возбуждения. Изменяя сопротивление – меняем ток, протекающий через обмотку возбуждения. Иногда обмотку возбуждения разбивают на несколько параллельных секций. В некоторых типах двигателей предусмотрена возможность отключения витков обмотки, так добиваются того же эффекта регулирования.
Тормозные режимы
В данном двигателе отсутствует режим генераторного торможения с отдачей энергии в сеть. На рисунке 2 вы можете видеть, что ветка гиперболы естественной характеристики не пересекает ось ординат (отрицательная скорость отсутствует).
Торможение противовключением получают путем переключения выводов якорной обмотки.
ДПТ ПВ нельзя соединять с механизмом при помощи ременной передачи, так как соскакивание или разрыв ремня приведет к разгрузке двигателя, что вызовет мгновенное повышение числа оборотов и последующему выходу из строя.
ДПТ ПВ нашли свое основное применение в качестве тяговых двигателей подвижного состава электровозов общего назначения, электровозов метрополитена и в трамваях.
Уравнение механической характеристики ДПТ с НВ
С учетом третьего уравнения в (4.1) уравнение (3.2) можно переписать в виде зависимости — которая представляет собой механическую характеристику ДПТ:
(3.7)
Данное уравнение определяет зависимость угловой скорости вращения от момента на валу двигателя. Т.к. в статике вращающий момент равен моменту сопротивления на налу ДПТ, то это уравнение определяет зависимость от .
Следует отметить, что величина электромагнитного момента превышает выходной момент на валу на величину, соответствующую потерям в стали и механическим потерям от трения, но в большинстве практических расчетов указанными потерями можно пренебречь.
Коэффициент пропорциональности можно считать постоянным для тех ДПТ с НВ, у которых имеются компенсационные обмотки или в случае, когда можно пренебречь влиянием реакции якоря на величину . В общем же случае влияние поперечной реакции якоря на величину магнитного потока ведет к нарушению линейности механической характеристики по мере увеличения тока.
Графическое изображение механической характеристики
Из выражения (3.7) следует, что графически механическая характеристика ДПТ с НВ может быть представлена прямой линией с двумя характерными точками — скоростью холостого хода и моментом короткого замыкания , который также называется пусковым. Величина определяется по формуле
(3.8)
C введением добавочного сопротивления в цепь якоря жесткость механических характеристик также падает, что с успехом используется при регулировании скорости вращения ДПТ.
По аналогии с электромеханическими характеристиками различают естественную и искусственные механические характеристики.
Уравнения механической характеристики можно переписать в виде
, (3.9)
где .
Способы регулирования угловой скорости вращения
Из уравнения механической характеристики (3.7) следует, что принципиально может регулироваться изменением , и .
Следует отметить, что естественный перепад угловой скорости вращения с увеличением нагрузки не входит в понятие регулирования .
Диапазон регулирования скорости вращения
Одним из основных параметров, характеризующих способы регулирования угловой скорости вращения, является диапазон регулирования . который в электроприводе определяется как отношение максимальной скорости вращения к минимальной :
. (3.10)
Как правило, диапазон регулирования представляют в числах в виде соотношения, например, 100:1 и т. п. Естественно диапазон регулирования увязывается с требуемой стабильностью скорости при заданном отклонении момента.
Регулирование скорости вращения изменением питающего напряжения
Как следует из выражения (3.7) при изменении питающего напряжения можно получить семейство параллельных механических характеристик (рис. 3.3).

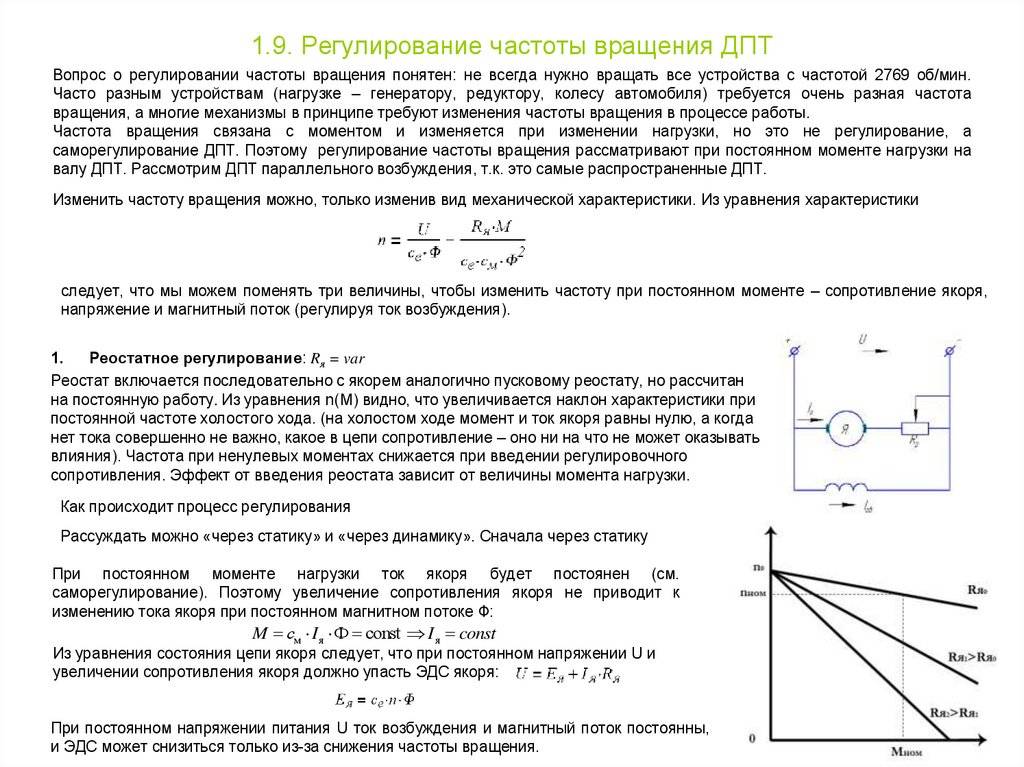





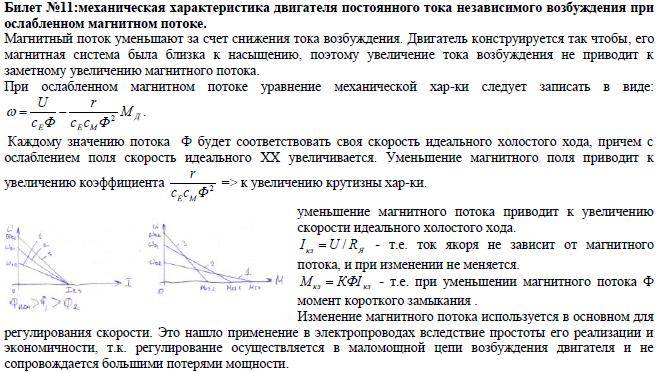


Рис. 3.3. Механические характеристики ДПТ с НВ при различных напряжениях на якоре:
Фактически имеется возможность только уменьшать напряжение питания якоря относительно его номинального значения , т.е. возможно регулировать угловую скорость вращения только вниз от основной (соответствующей естественной характеристике). Это обусловлено тем, что уже на стадии своего проектирования ДПТ рассчитывается на конкретное номинальное напряжение, превышение которого может привести к пробою изоляции.
Реостатное регулирование угловой скорости вращения ДПТ с НВ
Это один из простейших способов регулирования угловой скорости вращения. Схема его реализации представлена на рис. 3.1.
Из уравнения механической характеристики (3.7) следует, что при постоянном моменте сопротивления на валу можно получить различные установившиеся значения угловой скорости вращения ниже основной.
Жесткость механических характеристик уменьшается с увеличением величины добавочного сопротивления .
Диапазон регулирования скорости практически не превышает 2:1. Способ характеризуется большими тепловыми потерями на добавочном сопротивлении .
Предыдущая3Следующая
Рекомендуемые страницы:
Модели смешанного возбуждения
Для смешанного возбуждения свойственно расположение между параметрами устройств параллельного и последовательного возбуждения, чем легко обеспечивается значительность пускового момента и полностью исключается любая возможность «разноса» движкового механизма в условиях холостого хода.
В условиях смешанного типа возбуждения:

Двигатель смешанного возбуждения
Регулировка частоты моторного вращения при наличии возбуждения смешанного типа осуществляется по аналогии с двигателями, имеющими параллельное возбуждение, а варьирование МДС-обмоток способствует получению практически любой промежуточной механической характеристики.
Современное применение и перспективы
Существует немало устройств, для которых увеличение времени безотказной работы имеет важнейшее значение. В подобном оборудовании применение БДКП всегда оправданно, несмотря на их сравнительно высокую стоимость. Это могут быть водяные и топливные насосы, турбины охлаждения кондиционеров и двигателей и т. д. Бесщёточные моторы используются во многих моделях электрических транспортных средств
В настоящее время на бесколлекторные двигатели всерьёз обратила внимание автомобильная промышленность
БДКП идеально подходят для малых приводов, работающих в сложных условиях или с высокой точностью: питатели и ленточные конвейеры, промышленных роботы, системы позиционирования. Существуют сферы, в которых бесколлекторные двигатели доминируют безальтернативно: жёсткие диски, насосы, бесшумные вентиляторы, мелкая бытовая техника, CD/DVD приводы. Малый вес и высокая выходная мощность сделали БДКП также и основой для производства современных беспроводных ручных инструментов.
Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
где: n — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными рисунок 13.13, а (график 1 Rдоб = 0 ).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными .
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдобдля получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n — частота вращения холостого хода, об/мин.
Частота вращения холостого хода nпредставляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.
На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n, a Δn остается неизменным . В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман М.М. Справочник по электрическим машинам
Лекция 11
Замкнутые схемы управления АЭП с ДПТВопросы1) Замкнутые схемы управления электроприводов с двигателями постоянного тока по скорости2) Регулирование (ограничение) тока и момента двигателя постоянного тока с помощью нелинейной отрицательной обратной связи по току3) Замкнутая схема электрического привода с двигателями постоянного тока с обратными связями по скорости и току4) Замкнутые электропривода с подчиненным регулированием координат
- Замкнутые схемы управления электроприводов с
двигателями постоянного тока по скороститго.сз.свхз.сувхUусвхy2 Регулирование (ограничение) тока и момента двигателя постоянного тока с помощью нелинейной отрицательной обратной связи по токушо.тШо.тз.т отсо.т.отсо.твхз.свхyпз.т
- Замкнутая схема электрического привода с двигателями постоянного тока с обратными связями по скорости и току
отсотс
- Замкнутые электропривода с подчиненным регулированием координат
з.со.с1lо.с1о.с2о.с1о.со.с2з.тЛЕКЦИЯ 12Замкнутые схемы управления электроприводов сдвигателями переменного токаВопросы










- Замкнутая схема управления асинхронного электропривода, выполненного по системе «тиристорный регулятор напряжения—асинхронный двигатель» (ТРН—АД)
- Замкнутый электрический привод с частотным управлением асинхронного двигателя
- Замкнутая схема импульсного регулирования скорости асинхронного двигателя с помощью резистора в цепи ротора
1 Замкнутая схема управления асинхронного электропривода, выполненного по системе «тиристорный регулятор напряжения—асинхронный двигатель» (ТРН—АД)yтг з.с3.Cггуз.стг2Дс3.С2С1 С2ТГтгС2с3.С2 Замкнутый электрический привод с частотным управлением асинхронного двигателя3 Замкнутая схема импульсного регулирования скорости асинхронного двигателя с помощью резистора в цепи ротора2Д3.Co.cyЗ.С ОС2yЛЕКЦИЯ 13Электромашинные преобразователи частотыВопросы
- Законы частотного регулирования
- Электромашинные преобразователи частоты с использованием синхронного генератора
- Электромашинный асинхронный преобразователь частоты
- Вентильно-электромашинный преобразователь частоты
- Законы частотного регулирования
1 ?o=2?f1 /р11111 М= kФI2cos?2(U1/f1) =const(U1/f12)=constMc=const; Pc=const;
- Электромашинные преобразователи частоты с
использованием синхронного генератораU2f2=constном4
- Электромашинный асинхронный преобразователь частоты
21М2М2121221.212?. 22
- Вентильно-электромашинный преобразователь частоты
ЛЕКЦИЯ 14Статические преобразователи частотыВопросы
- Преобразователи частоты с непосредственной связью
- Статический преобразователь частоты с промежуточным звеном постоянного тока
- Преобразователь частоты с инвертором, работающим по принципу широтно-импульсной модуляции (ШИМ)
- Преобразователи частоты с непосредственной связью
Статический преобразователь частоты с промежуточнымзвеном постоянного тока
- Преобразователь частоты с инвертором, работающим по принципу широтно-импульсной модуляции (ШИМ)
,Лекция 15Энергосбережение в АЭПВопросы
- Общие вопросы энергосбережения
- Способы повышения КПД и коэффициента мощности АЭП
- Снижение потерь энергии в переходных режимах
- Энергосбережение в регулируемом АЭП
- Общие вопросы энергосбережения
ГОСТ Р 51379—99. Энергосбережение. Энергетический паспорт промышленного потребителя топливно-энергетических ресурсов.ГОСТ Р 31380—99. Энергосбережение. Методы подтверждения соответствия показателей энергетической эффективности энергопотребляющей продукции их нормативным значениям. Общие требования.ГОСТР 51387—99. Энергосбережение. Нормативно-методическое обеспечение.ГОСТР 51541-99. Энергосбережение. Энергетическая эффективность. Состав показателей.
- Способы повышения КПД и коэффициента мощности АЭП
22эппууэдмпСпособы повышения КПД и коэффициента мощности ЭП:
- обеспечение нагрузки близкой к номинальной (в том числе путем замены малонагруженного (менее 40% от номинальной мощности) двигателя на двигатель меньшей мощности (должно быть экономически обоснованно));
- выбор высокочастотных электродвигателей.
- Снижение потерь энергии в переходных режимах
11c,c,, 22ном
- Энергосбережение в регулируемом АЭП
(номном22.1эл2
Уравнение механической характеристики
Наиболее важные механические характеристики ДПТ представлены естественными и искусственными критериями, при этом первый вариант сравним с номинальным напряжением питания в условиях полного отсутствия добавочного сопротивления на обмоточных цепях мотора. Несоответствие любому из заданных условий позволяет рассматривать характеристику в качестве искусственной.
Это же уравнение может быть представлено в форме ω = ω о.ид. — Δ ω, где:
- ω о.ид. = Uя/kФ
- ω о.ид — показатели угловой скорости холостого идеального хода
- Δ ω = Мэм. [(Rя+Rд)/(kФ)2]— снижение показателей угловой скорости под воздействием нагрузки на вал мотора при пропорциональном сопротивлении цепи якоря
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ
Независимо от типа электрической машины (синхронная или асинхронная, коллекторная или бесколлекторная) все они обладают следующими техническими характеристиками:
- количество рабочих фаз – одна или три (за исключением шаговых моделей);
- мощность электрическая и на валу;
- схемы соединения обмоток («звезда» или «треугольник»);
- класс защиты оборудования.
В однофазных машинах запуск осуществляется либо вручную, либо в них предусматривается специальная пусковая обмотка (фазосдвигающая цепочка с конденсатором).
В 3-х фазных агрегатах вращающееся э/м поле создается тремя независимыми катушками, размещенными на статоре под углом 120 градусов одна к другой. Соответствующие им ЭДС разнесены в электрическом пространстве на те же углы.
Виды мощности:
1. Электрической называют мощность, потребляемую от сети фазными обмотками двигателя в рабочем режиме.
2. Механическая мощность на валу – развиваемое ЭПТ вращательное усилие, измеряемое в Ваттах и характеризующее эффективность преобразования или КПД всего двигателя.
Модели смешанного возбуждения
Для смешанного возбуждения свойственно расположение между параметрами устройств параллельного и последовательного возбуждения, чем легко обеспечивается значительность пускового момента и полностью исключается любая возможность «разноса» движкового механизма в условиях холостого хода.
В условиях смешанного типа возбуждения:
Двигатель смешанного возбуждения
Регулировка частоты моторного вращения при наличии возбуждения смешанного типа осуществляется по аналогии с двигателями, имеющими параллельное возбуждение, а варьирование МДС-обмоток способствует получению практически любой промежуточной механической характеристики.
Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид

где: n — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).

Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными рисунок 13.13, а (график 1 Rдоб = 0 ).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными .
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдобдля получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n — частота вращения холостого хода, об/мин.
Частота вращения холостого хода nпредставляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.









На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n, a Δn остается неизменным . В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман
М.М.Справочникпоэлектрическиммашинам Источник
Универсальная характеристика (граничная).
Если построить граничную характеристику в относительных единицах, то получим универсальную характеристику для всей серии машин, т.к. характеристики магнитных цепей магнитных систем двигателей одной сери можно считать подобными и, если такая кривая есть, то скорость двигателя при любом значении сопротивления якорых цепей будет определятся как: w=wгр(1-RяIя).
В литературе обычно используется универсальная скоростная естественная характеристика, где за базисную скорость принимают номинальную скорость. Но следует заметить, что жесткость таких характеристик зависит от сопротивления, а относительное значение (Rя+Rов)
изменяется в широких пределах, то эти характеристики не являются универсальными в полном смысле слова для всех двигателей, универсальные естественные характеристики для одной серии машин обычно приводят до 10 кВт и выше 10 кВт.
Их вид следующий:
;
;
.
Механическая характеристика
На сегодняшний день эксплуатируются электромоторы ПТ нескольких категорий, имеющие различные виды возбуждения:
- независимого типа, при котором обмоточное питание определяется независимым источником энергии;
- последовательного типа, при котором подключение якорной обмотки выполняется в последовательном направлении с обмоточным элементом возбуждения;
- параллельного типа, при котором роторная обмотка подключается в электрической цепи в параллельном для источника питания направлении;
- смешанного типа, основанном на наличии нескольких последовательных и параллельных обмоточных элементов.

Механическая характеристика двигателя постоянного тока независимого возбуждения ДПТ
Благодаря особым механическим характеристикам устройства с постоянными токовыми величинами способны легко переносить негативные внешние воздействия, что объясняется закрытым корпусом с уплотнительными элементами, абсолютно исключающими попадание влаги внутрь конструкции.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Такой тип двигателя обладает превосходными характеристиками, особенно при совершении управления посредством датчиков положения. Если момент сопротивления варьируется или вовсе неизвестен, а также при необходимости достижения более высокого пускового момента используется управление с датчиком. Если же датчик не используется (как правило, в вентиляторах), управление позволяет обойтись без проводной связи.
Особенности управления трёхфазным бесколлекторным двигателем без датчика по положению:
- расположение ротора определяют при помощи дифференциального АЦП (аналого-цифрового преобразователя);
- токовую перегрузку определяют также при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора;
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- рекомендуемыми микроконтроллерами считаются AT90PWM3 и ATmega64;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI.
Особенности управления трёхфазным бесколлекторным двигателем с датчиком по положению на примере датчика Холла:
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- выход каждого из датчиков Холла подключают к соответствующей линии ввода-вывода микроконтроллера, настроенной при изменениях состояния на генерацию прерываний;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI;
- токовую перегрузку определяют при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора.





