Аппаратное прерывание
И тут я понял, в чём дело: Ардуино не успевает обрабатывать показания датчиков Холла! Поэтому необходимо было использовать пины Ардуино с аппаратным прерыванием. Так как у Ардуино УНО таких пинов всего два, а под датчики нужно три пина, надо взять Ардуино Леонардо или Искра Нео, где таких пинов — четыре штуки.

Переписав программу под прерывания и подключив Искру Нео вместо УНО, я повторил испытания.
Колесо наконец-то заработало чётко, без вибраций, шумов, отлично стало набирать обороты без рассинхронизации. Прототип оказался жизнеспособным. Но это ещё не полноценный контроллер, поскольку в нём не было обвязки с защитами и обеспечением качественного ШИМ-сигнала.
Тестирование контроллера
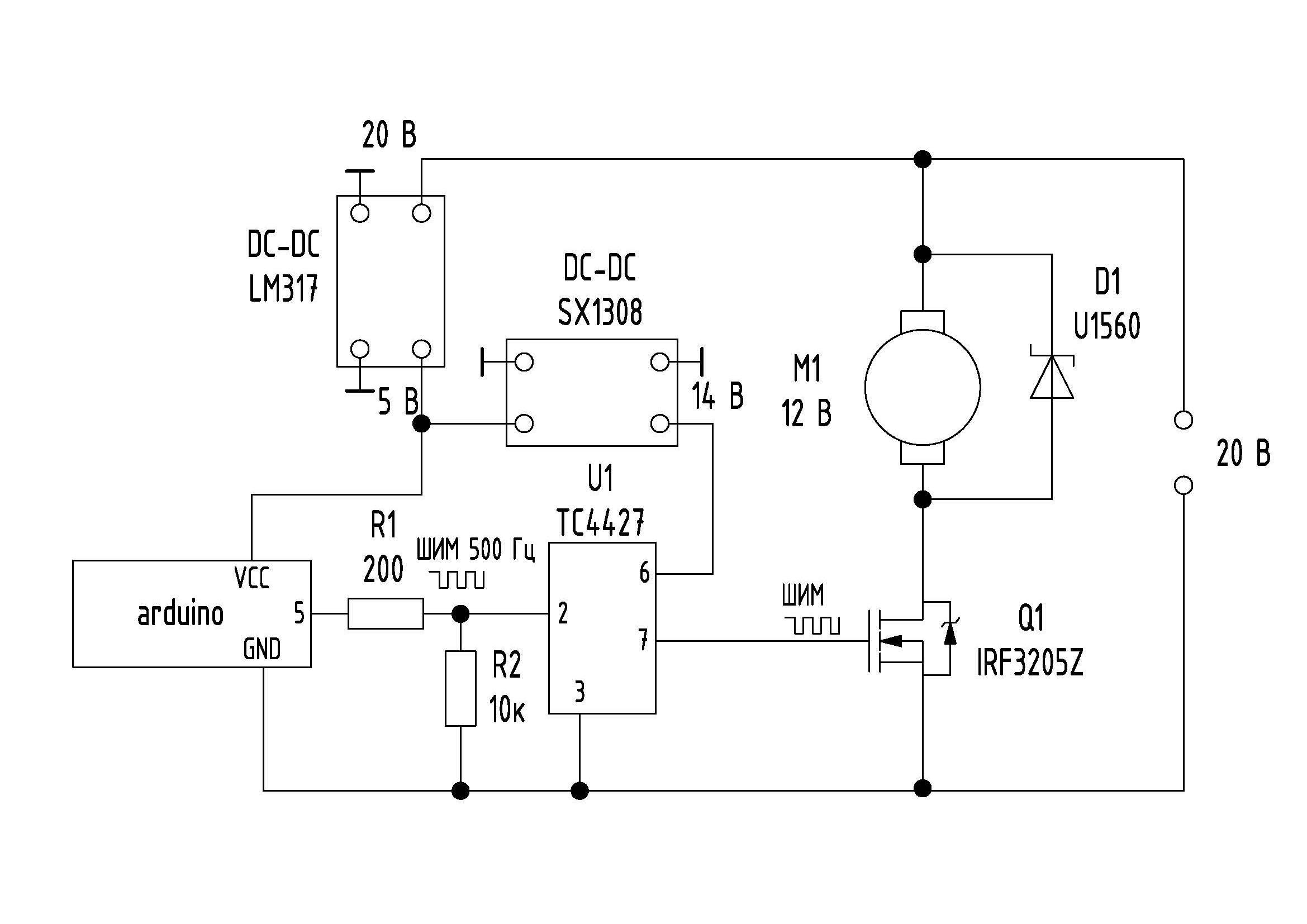
Одним способом применения данного контроллера является плавное регулирование оборотов электродвигателя.
При этом можно не удалять штатную дискретную схему регулировки оборотов – она остаётся, не нарушается и продолжает работать.
Схема подключается лишь тремя проводами: плюс на 12 Вольт, масса и провод самого электродвигателя.
Также плату можно использовать для замены переключателя и гасящего резистора в родной схеме.
Первым делом при тестировании убедитесь, что все детали на своём месте и надёжно закреплены.
Дальше изготовленный ШИМ регулятор для двигателя электровелосипеда должен быть одновременно подключён и к аккумулятору, и к мотору велосипеда, что будет приводить его в движение.
Используйте набор ячеек литиевых батарей, номинальное напряжение которые составляет 80 Вольт (такие батареи как раз используются в электровелосипедах).
Поворачивая потенциометр по часовой стрелке, двигатель вашего велосипеда постепенно начнёт вращаться, а его скорость увеличиваться пропорционально вращению ручки.
Если всё в порядке, то ваш самодельный ШИМ контроллер собран правильно.
Рекомендую следующее видео, в котором автор изготавливает ШИМ регулятор своими руками:
КОНТРОЛЛЕР ДЛЯ КОЛЛЕКТОРНЫХ ДВИГАТЕЛЕЙ 36 В 800 Вт
- В наличии
- Оптом и в розницу
2 800 руб. /комплект
Показать оптовые цены
| День | Время работы | Перерыв |
|---|---|---|
| Понедельник | 08:30 — 23:00 | |
| Вторник | 08:30 — 23:00 | |
| Среда | 08:30 — 23:00 | |
| Четверг | 08:30 — 23:00 | |
| Пятница | 08:30 — 23:00 | |
| Суббота | 09:30 — 23:00 | |
| Воскресенье | 09:30 — 23:00 |
* Время указано для региона: Россия, Казань
Сроки возврата
Возврат возможен в течение 7 дней после получения (для товаров надлежащего качества).
Обратная доставка товаров осуществляется по договоренности.
Согласно действующему законодательству вы можете вернуть товар надлежащего качества или обменять его, если:
- товар не был в употреблении и не имеет следов использования потребителем: царапин, сколов, потёртостей, пятен и т. п.;
- товар полностью укомплектован и сохранена фабричная упаковка;
- сохранены все ярлыки и заводская маркировка;
- товар сохраняет товарный вид и свои потребительские свойства.
Является мощным универсальным контроллером для мотора электровелосипеда, электроскутера и др.
Если у вас на моторе два провода, тогда контроллер подойдет.
Технические характеристики контроллера:
- Номинальный вольтаж: 36 Вольт,
- Рабочий вольтаж: 41,5-55 Вольт,
- номинальная/ Максимальная сила тока: 28 Ампер,
- Номинальная мощность: 250-1000 Ватт,
- Холла сигнал: 1-4,2 Вольт,
- Пусковой сигнал: с нулевой скорости, от ручки газа,
- Защита от перегрева: отключение при внутренней температуре ,
- Защита от короткого замыкания: есть,
- Контроллер защищен от влаги по стандарту IP54,
- Вес: 0,81кг.
Подходит для свинцовых и литиевых батарей. Используется для ремонта детских и взрослых квадроциклов (электромобилей и электросамокатов) на 250W, 350W, 500W, 800W, 1000W,
Схема подключения контроллера 36 вольт, 800 ватт к электроквадроциклу:
1. Толстые КРАСНЫЙ и ЧЕРНЫЙ ― питание контроллер (35 вольт максимум, 20.5 вольт ― отсечка).
2. Тонкие КРАСНЫЙ и СИНИЙ (LOCK) ― замок зажигания, для работы контроллера необходимо их замкнуть.
3. Тонкие ЧЕРНЫЙ и КРАСНЫЙ (BATTERY CAPACITY) ― провода к индикации остатка заряда батарей (можно никуда не подключать, на работу контроллера никак не влияет).
4. Тонкие КРАСНЫЙ и ЧЕРНЫЙ (CHARGER)― к гнезду зарядки (просто соединены с питающими проводами), можно никуда не подключать.
5. Тонкие ЖЕЛТЫЙ и ЧЕРНЫЙ (BRAKE)― к тормозным рукояткам (можно никуда не подключать).
6. Тонкие КРАСНЫЙ, ЧЕРНЫЙ и СИНИЙ (DERAILLEUR) ― к рукоятке управления мощности.
7. Тонкие КРАСНЫЙ и ЧЕРНЫЙ (BRAKE LIGHTS) ― к тормозным огням.
Дополнительно можно приобрести сверх мощный фонарь с питанием от аккумулятора 48 В, сумочку для контролера, LED или LCD дисплей, датчик педалирования PAS, усилители дропаудов (для более жесткой фиксации мотора), кассету звезд. Смотрите в разделе Акссесуары к электровелосипедам
Информация представленная на сайте не является публичной офертой
Цена: 2 800 руб. /комплект
Каталог разбит на категории:
· Редукторные мотор колеса для велосипедов;
· Мотор колеса прямого хода;
· Аккумуляторы lifepo4 и литий йонные;
· Велосипеды с электрическим мотором;
· Инвалидные коляски с электромотором и другая электротехника.
В нашем магазине можно заказать литиевые батареи с различным значением напряжения – 12, 24, 36, 48, 60 или 72 В. У многих аккумуляторов напряжение в процессе разрядки постепенно падает, в результате снижается максимальная скорость электроустановки. Именно железо-фосфатные аккумуляторы в процессе разряда не сильно снижают напряжение под нагрузкой, что не сказывается на темпе передвижения.



От ёмкости устройства зависит время работы и дальность поездки в прямопропорциональном соотношении. У нас имеются батареи ёмкостью от 20 Ач до 400 ач, что гарантирует удовлетворение любых задач. Если у вас есть вопросы по электроустановке и подборе техники для вашего велосипеда, свяжитесь с менеджером компании по телефону 8 (900) 322-22-26.
Выбор частоты ШИМ
Предположим ситуацию, когда, частота ШИМ 8 кГц, скважность 100% (полный газ), двигатель вращается со скоростью, при которой частота коммутаций тоже равняется 8 кГц. Т.е
от момента переключения ключей до следующего переключения проходит ровно один период ШИМ сигнала. Если скорость вращения возрастёт и частота коммутаций превысит частоту ШИМ, возникнет ситуация, при которой ШИМ сигнал будет удерживать ключи открытыми дольше необходимого и противодействовать вращению двигателя. Кроме того, измерение напряжения на свободной фазе синхронизированы частотой ШИМ сигнала, поэтому нет технической возможности вычислить скорость коммутации выше частоты ШИМ. Другими словами контролер теоретически не сможет управлять двигателем, если тот вращается со скоростью, при которой частота коммутаций превышает частоту ШИМ сигнала. Это только теоретические расчеты. На практике, желательно чтобы частота ШИМ в несколько раз превышала частоту коммутаций.
Например, имеем регулятор с частотой ШИМ 8 кГц, и двигатель с 14 магнитами.
Максимальная теоретически возможная частота вращения вала двигателя будет:
V=(Q/6/(N/2)*60);
Q – частота ШИМ в герцах
6 – количество коммутаций за один электрический оборот
N – количество магнитов
60 – количество секунд в минуте
V=((8000/6/(14/2))*60) = 11428 об/мин.
Двигатель с 28 магнитами:
V=((8000/6/(28/2))*60) = 5714 об/мин.
Т.е. если вам нужно управлять многополюсным двигателем на высоких оборотах, придется использовать регулятор с более высокой частотой ШИМ.
Например, чтобы раскрутить двигатель с 24 магнитами до 10000 об/мин понадобится регулятор с частотой ШИМ не ниже 24кГц. Нужно так же помнить, что чем выше частота ШИМ, тем больше переходных процессов происходит на ключах за единицу времени. Это может привести к увеличению потерь и к увеличению тепловыделения на ключах.
Статьи по бесколлекторным моторам:
- Что такое Бесколлекторный мотор?
- Устройство бесколлекторного мотора
- Как управлять бесколлекторным мотором с датчиками Холла (Sensored brushless motors)
- Как управлять бесколлекторным мотором без датчиков (Sensorless BLDC)
- Запуск бездатчикового бесколлекторного мотора (Sensorless BLDC)
- Определение положения ротора бесколлекторника в остановленном состоянии
- Контроллер бесколлекторного мотора. Структура ESC
- Схема контроллера бесколлекторного мотора (ESC)
- Силовая часть контроллера бесколлекторного мотора
- Литература по бесколлекторнм моторам
- Примеры на С для управления бесколлекторными моторами
- Схема контроллера бесколлекторного мотора BLDC, PMSM на микроконтроллере STM32
- STM32. Управление бесколлекторным мотором (BLDC)
- STM32. Пример регулятора для бесколлекторного PMSM
- Видео о бесколлекторных моторах. BLDC, PMSM, векторное управление
Прототип на Ардуино
Под рукой у меня была Arduino UNO, и я решил собрать контроллер на её основе.
Первым делом я подал на датчики Холла питание 5 вольт от Ардуино (его достаточно для датчиков). Сигнальные провода от датчиков подключил на цифровые пины Ардуино, написав простейшую программу для считывания и обработки сигналов с датчиков.
Затем собрал Н-мост из полевых NPN-транзисторов. Подвёл к мосту независимое питание на 12 вольт. Но при отладке, чтоб убедиться в работоспособности, я подключил напрямую шесть пинов 5V из Ардуино на затворы H-моста. У большинства полевых транзисторов затвор работает на 20 вольт. Так делать нельзя, потому что Н-мост будет плохо работать и перегреваться. Но для кратковременных тестов это пойдёт. Кое-как, с сильными перегревами и страшными звуками, вибрациями и толчками колесо медленно закрутилось. Начало положено.
Способы управления шаговыми двигателями
Есть несколько различных способов управления шаговыми двигателями – полный шаг, полушаг, и микрошаговый. Каждый из этих стилей предлагают различные крутящие моменты, шаги и размеры.
Полный шаг – такой привод всегда имеет два электромагнита. Для вращения вала, один из электромагнитов выключается и далее электромагнит включен, вызывая вращение вала на 1/4 зуба (по крайней мере для гибридных шаговых двигателей). Этот стиль имеет самый сильный момент вращения, но и самый большой размер шага.
Полшага. Для вращения центрального вала, первый электромагнит находится под напряжением, как первый шаг, затем второй также под напряжением, а первый все еще работает на второй шаг. При третьем шаге выключается первый электромагнит и четвертый шаг – поворот на третий электромагнит, а второй электромагнит по-прежнему работает. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
Микрошаговый имеет наименьший размер шага из всех этих стилей. Момент вращения, связанный с этим стилем, зависит от того, как много тока, протекает через катушки в определенное время, но он всегда будет меньше, чем при полном шаге.
Аппаратное прерывание
И тут я понял, в чём дело: Ардуино не успевает обрабатывать показания датчиков Холла! Поэтому необходимо было использовать пины Ардуино с аппаратным прерыванием. Так как у Ардуино УНО таких пинов всего два, а под датчики нужно три пина, надо взять Ардуино Леонардо или Искра Нео, где таких пинов — четыре штуки.
Переписав программу под прерывания и подключив Искру Нео вместо УНО, я повторил испытания.
Колесо наконец-то заработало чётко, без вибраций, шумов, отлично стало набирать обороты без рассинхронизации. Прототип оказался жизнеспособным. Но это ещё не полноценный контроллер, поскольку в нём не было обвязки с защитами и обеспечением качественного ШИМ-сигнала.
Драйверы TI для BDC
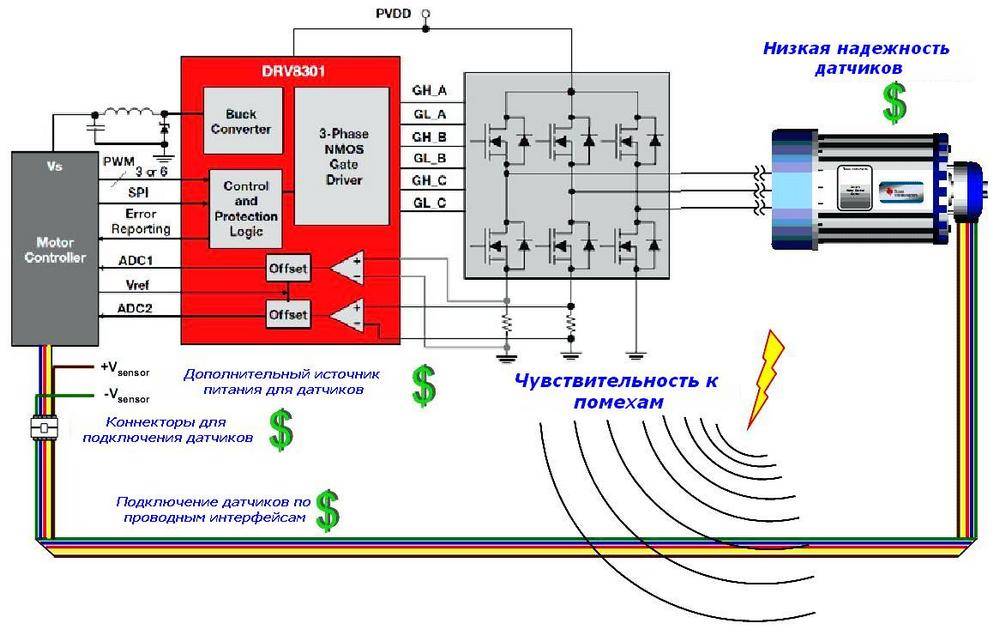
Для управления – коллекторными электродвигателями постоянного тока – предназначено специальное семейство драйверов DRV8x, ряд представителей которого изображен на рисунке 16. Они обеспечивает полную защиту от превышения напряжения и тока, короткого замыкания и перегрева. Благодаря возможностям интерфейса управления эти драйверы обеспечивают простую и эффективную эксплуатацию двигателей. Пользователи могут с помощью одного чипа управлять одним или несколькими двигателями c рабочим напряжением 1,8…60 В.

Рис. 16. Драйверы TI для управления коллекторными двигателями
Драйверы семейства выпускаются как с интегрированными силовыми ключами, так и как предварительные драйверы. Они требуют минимум дополнительных компонентов, обеспечивают компактность решений, сокращают время разработки и позволяют быстрее выпустить новые продукты на рынок.
Спящий режим (Sleep) позволяет минимизировать потребление энергии в режиме простоя и обеспечивает ускоренную активизацию при запуске двигателя. Для управления скоростью вращения могут использоваться внешние сигналы ШИМ или сигналы PHASE/ENABLE для выбора направления вращения и включения ключей выходного моста.
Имеющий четыре выходных моста драйвер DRV8823 способен управлять двумя ШД или одним ШД и двумя BDC, или же четырьмя BDC, используя при этом управляющий интерфейс SPI.
На рисунке 17 представлена функциональная схема простого драйвера DRV8837 для управления одним коллекторным двигателем.

Рис. 17. Блок-схема драйвера DRV8837
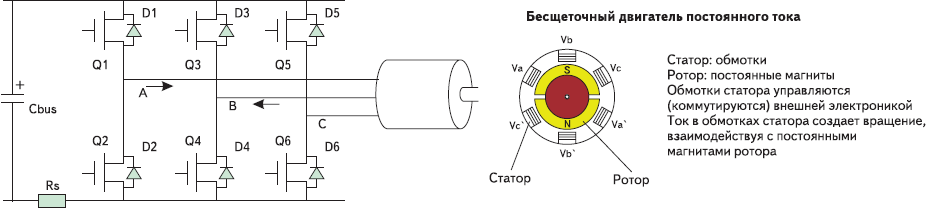
Трехфазные и однофазные двигатели

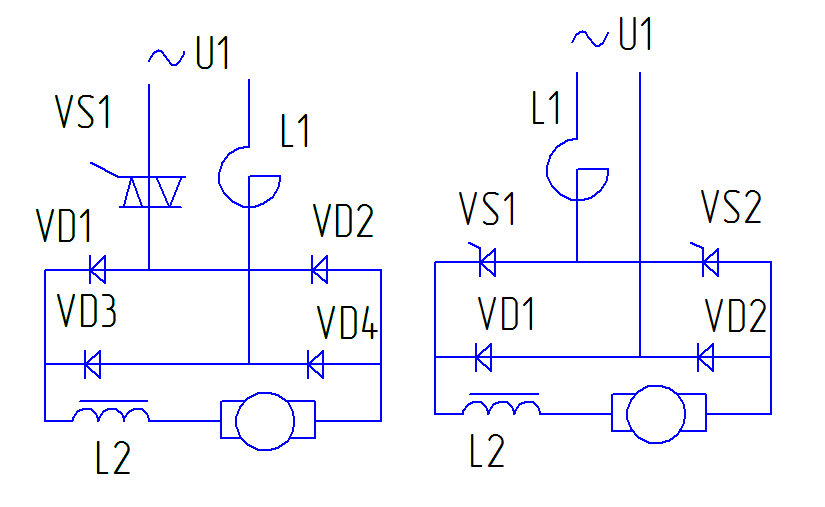
Схемы подключения двигателя звезда, треугольник
Предваряя обсуждение подключения двигателя звезда/треугольник, начитаем теорию. Трехфазный и однофазный двигатели снабжены иногда тремя проводами подключения. Бросьте далеко ходить. Возьмем следующие два случая:
Трехфазный двигатель имеет внутреннюю коммутацию обмоток схемой звезда. Полюсы снабжены одной общей точкой. Три фазы подключаются к противоположным концам обмоток. Катушки абсолютно идентичные, одинаковые. Внутри создается вращающееся движущееся поле, за счет которого движется вал. Ротор представлен барабаном силумина с медными прожилками. Ток не подводится, магнитные полюсы образуют путем наведенных токов. Захватываются вращающим полем ротора, начинается движение. Особенностью конструкции назовем невозможность (без специальных мер) подключения сети 230 вольт. Потребовалось бы соединить обмотки схемой треугольника, сделать невозможно. Разумеется, статор можно вскрыть, найти общую точку, сделать три отвода, разорвав контакты меж катушками. Второй особенностью двигателя является отсутствие нулевого провода. Многих положение дел ставит в тупик – куда девается ток? Заряды двигаются по проводам меж фазами. Закон электротехники гласит: для подключения трех фаз нагрузке необязательно иметь общий провод, если потребление трех ветвей одинаковое. В противном случае понадобится нейтраль предоставить. Жизненный пример: допустим, нужно подключить на 380 вольт электрочайник. Маразм? Каждая фаза амплитудой 230 вольт, рабочие хотят кипятку – невозможно отказать. Берем одну из фаз, другой вывод вилки вешаем на нейтраль. Учтите, фазы в пределах одного потребителя нужно нагружать поровну (грубо говоря, по чайнику каждой линии дайте), иначе негативные последствия коснутся питающего трансформатора подстанции.
- Однофазный двигатель может иметь три вывода. Заземление ни при чем, идет отдельно ушком на корпус. Что касается трех выводов, питают пусковую (либо конденсаторную), рабочую обмотку. Одни провод общий, будет схемная земля. Без сего двигатель работать откажется. Правда, трехфазный двигатель проще? Потому используют производства. Что касается подключения однофазного двигателя, одна катушка обычно имеет большее сопротивление. Разница значительнее, двукратной показывает пусковую обмотку. Сопротивление большего номинала. Нужно параллельно повесить конденсатор (емкость определяется, например, минимальным потребляемым током), когда вал раскрутится, цепь обрывается. Иначе, спустя промежуток времени, пусковая обмотка выйдет из строя вследствие чрезмерного перегрева. Если двигатель конденсаторный (бифилярный), цепь с конденсатором работает постоянно. Нормальный режим, благодаря сдвигу фаз, созданному реактивным элементом, образуется вращающееся поле статора нужной формы.
Итак, лежит два двигателя, видом похожие, подключать нужно разным образом
Важной частью корпуса выступает схема подключения электродвигателя. Расположена на шильдике, выбита на кожухе
Становится понятно, на сколько фаз рассчитан мотор, как врубить в цепь. Информация отсутствует – попробуем доработать недочет своими руками. Понадобится китайский тестер.



У трехфазного двигателя три контакта попарно будут давать одинаковое сопротивление, равное удвоенному значению номинала обмотки. Мотор 230 вольт результаты измерений даст неодинаковые:
- Самый большой показатель тестера меж фазными концами. Напряжение 220 вольт подается напрямую одному, другому через конденсатор. Емкость сильно зависит от мощности, скорости вращения вала. Параметр определяет средняя нагрузка вала в рабочем режиме.
- Наименьшее значение образуется меж концами рабочей обмотки.
- Третий номинал занимает промежуточное положение. Сумма с сопротивлением рабочей обмотки равняется первому пункту списка.
Вопрос приобретения узла тесно касается использования специальных справочников. Чужеродное пускозащитное реле с данным типом электродвигателя использовать категорически нельзя. Велика вероятность некорректной работы, выхода прибора из строя. Практически умельцы вручную обрывают цепь. Способ неправильный, имеет право существовать.
Добавим, что пропадание одной фазы может негативно сказаться на некоторых типах моторов. Экспериментируя с агрегатом, реализуя подключение двигателя звезда-треугольник, старайтесь избегать ситуаций. Принято осуществлять пуск специальными защитными автоматами, вырубающими питание при возникновении опасности.
Мостовые драйверы
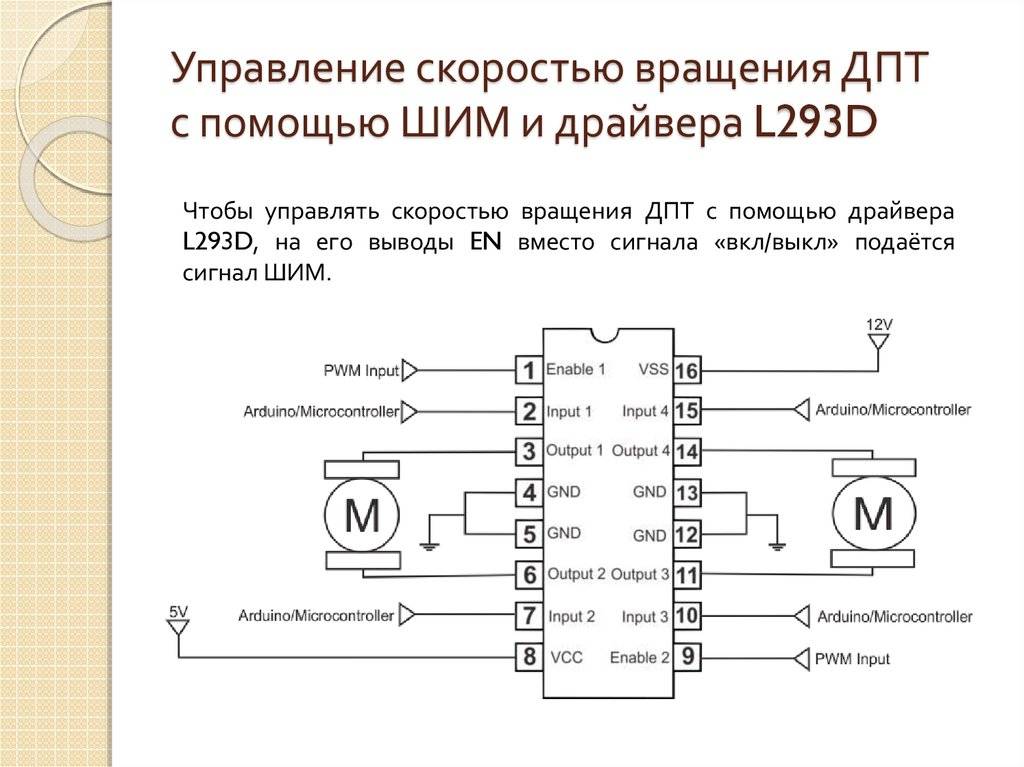
Далее предстояла работа над напряжением 20 вольт на управление затворами. Для этого существуют мостовые драйверы транзисторов, они обеспечивают стабильные импульсы в 20 вольт на затвор и высокую скорость отклика. Сначала у меня были популярные драйверы для маломощных моторов L293D.

Для управления затворами его достаточно, к тому же их очень просто использовать. Один такой драйвер может обеспечить питанием две пары ключей. Поэтому я взял две штуки L293D. Собрал контроллер с этими драйверами, и колесо начало крутиться существенно плавнее, посторонних звуков стало меньше, нагрев транзисторов уменьшился. Но при увеличении оборотов синхронизация с контроллером пропадала, появлялся посторонний звук, колесо дёргалось, вибрировало и полностью останавливалось.
В это же время я наткнулся на два варианта мостовых драйверов:
- HIP4086
- IR2101
Что касается HIP4086, то это полноценный мостовой драйвер, предназначенный для трёхфазного электродвигателя. Мне он показался несколько замороченным, и мои попытки использовать его в контроллере не увенчались успехом: он у меня так и не заработал. Углублённо разбираться в причинах не стал.
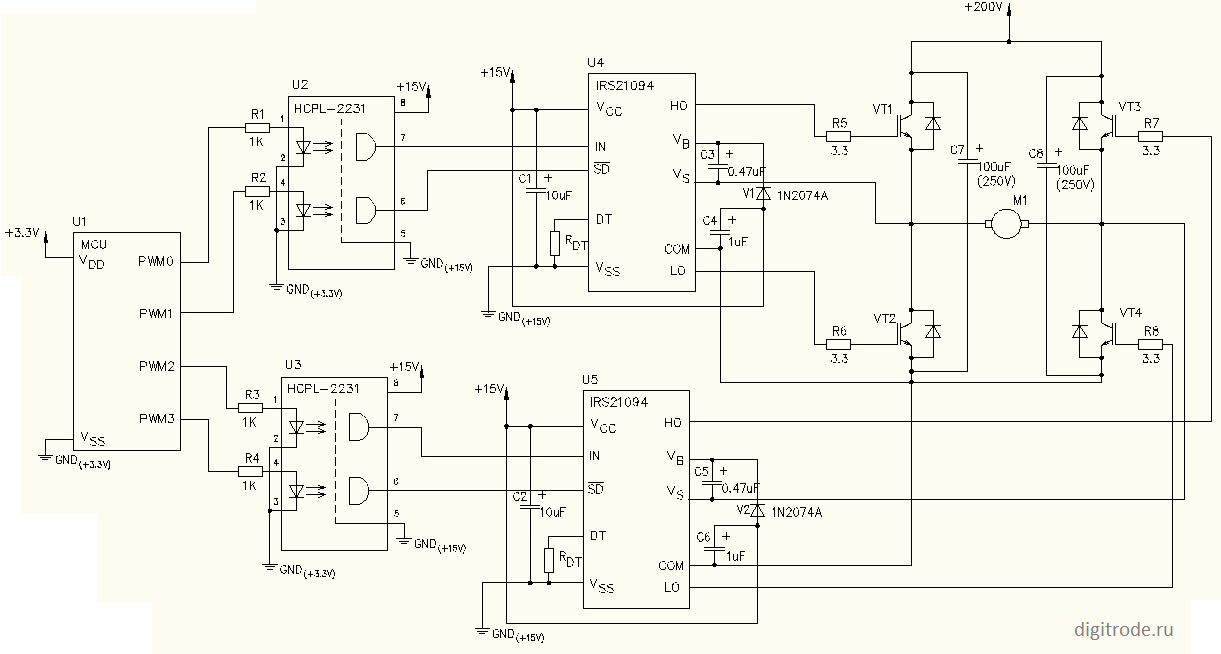
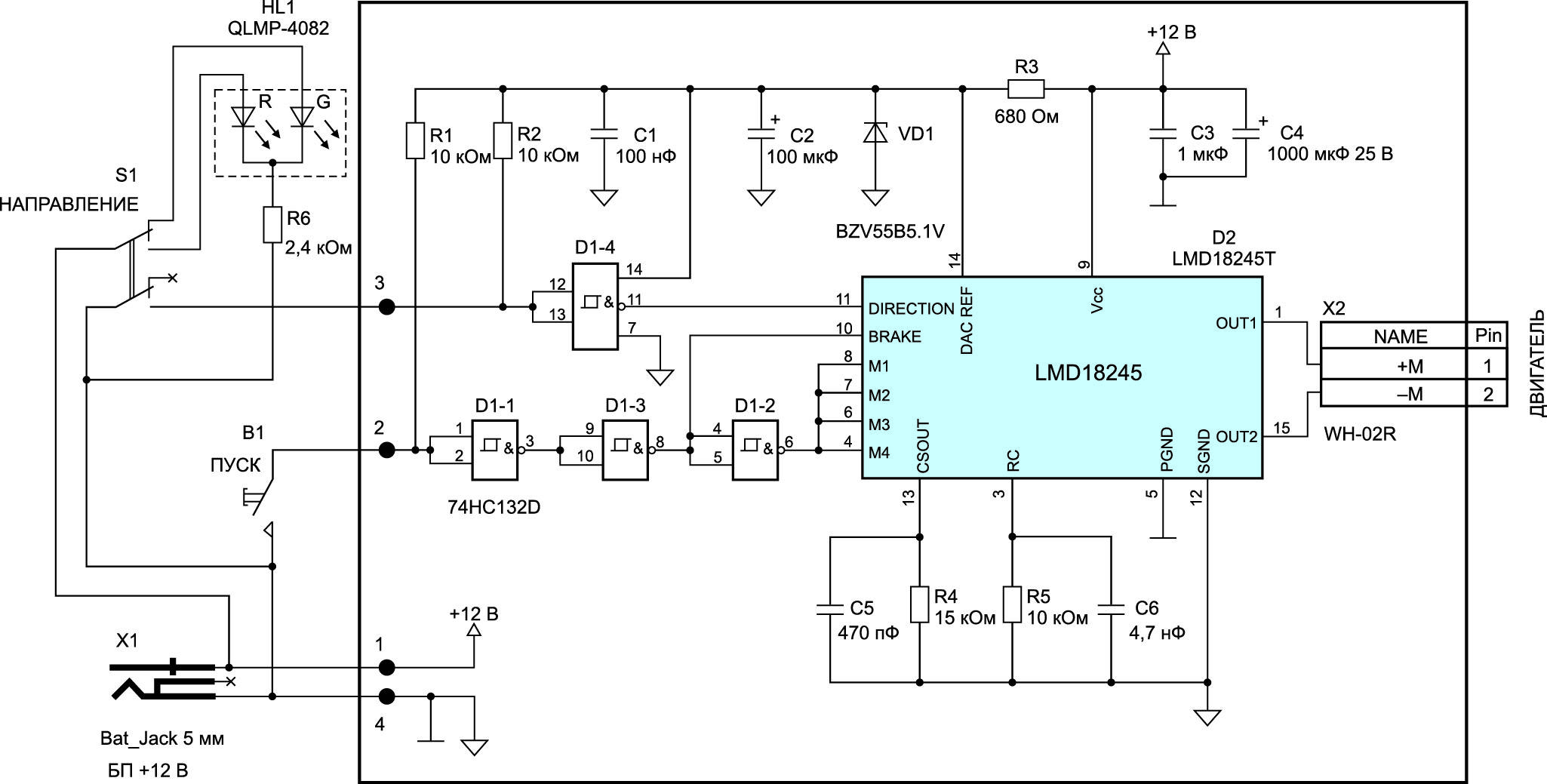
А взял я IR2101 — полумостовой драйвер, обеспечивающий работу нижнего и верхнего ключей для одной фазы. Несложно догадаться, что таких драйверов нужно три. К слову, драйвер очень прост в использовании, его подключение происходит безболезненно и легко. Получилась такая схема:

И готовый результат

Собрал контроллер с этим драйвером и запустил двигатель. Ситуация с работой электродвигателя кардинально не поменялась, симптомы остались те же, как и в случае с драйвером L293D.
Типы контроллеров электромоторов
Существует несколько типов исполнительных механизмов (шаг 3). Следовательно, существует несколько типов контроллеров двигателей.
- Машинные контроллеры двигателя постоянного тока. Они используются с шестерёнчатыми двигателями постоянного тока, постоянного тока и многими линейными приводами.
- Бесщеточные контроллеры двигателя постоянного тока. Используются с бесщеточными двигателями постоянного тока.
- Сервомоторы: используются для хобби сервомоторов.
- Контроллеры шагового двигателя. Используются с однополярными или биполярными шаговыми двигателями в зависимости от их типа.
Откуда берётся ШИМ
Вариант 1 — аналоговый
ШИМ сигнал создаётся специально сконструированными устройствами – генераторами ШИМ сигнала или генераторами прямоугольных импульсов. Они могут быть собраны как на аналоговой базе, так и на основе микроконтроллеров, как в виде схемы из нескольких транзисторов, так и в виде интегральной микросхемы.
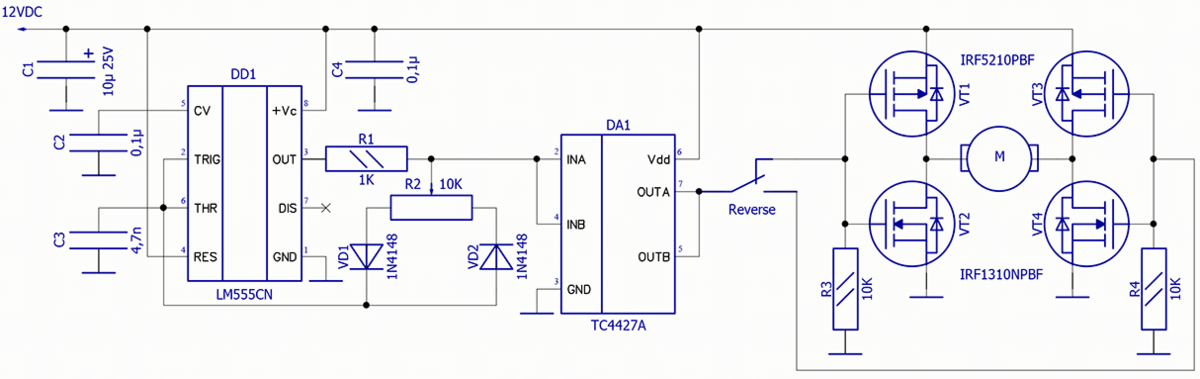
Самый простой вариант это микросхема NE555, собирается всё по схеме:
Схема ШИМ генератора на NE555
Но если лень разбираться и паять, то китайцы за нас всё уже давно сделали.
ШИМ генератор на NE555
Стоит $0,5, работает стабильно при питании от 5 до 16 вольт
Выдаёт ШИМ сигнал амплитудой в 5 вольт, скважность можно менять подстроечным резистором (вон та синяя штуковина с вырезом под отвертку). При желании можно заменить подстроечный резистор на переменный и получим удобную ручку регулировки
Вариант 2 – цифровой
Более сложный для новичка – использование микроконтроллера, но вместе с тем более интересный и дающий широкие возможности. Звучит страшно, но самом деле реализуется довольно просто.
В качестве микроконтроллера удобнее всего взять отладочную плату ардуино.
Как с ней работать написано вот здесь. Подключаем ардуинку к компьютеру и заливаем в неё вот такой наисложнейший код:
void setup() {
pinMode(3,OUTPUT); // опреднляем пин D3 как выход
}
void loop() {
int duty = 30; // определяем скважность равной 30%
int value = 255/10*duty; // переводим значение скважности в 8 битный формат
analogWrite(3, value); // выводим ШИМ значением value на пин D3
1
2
3
4
5
6
7
voidsetup(){
pinMode(3,OUTPUT);// опреднляем пин D3 как выход
}
voidloop(){
intduty=30;// определяем скважность равной 30%
intvalue=25510*duty;// переводим значение скважности в 8 битный формат
analogWrite(3,value);// выводим ШИМ значением value на пин D3
Далее цепляемся осциллографом к пину D3 и видим:
ШИМ скважность 30%
Сигнал частотой (Freq) -526 Гц, амплитудой (Vmax)- 5 вольт и скважностью (duty) – 30.9 %. Меняем скважность в коде — меняется и скважность на выходе
Добавляем датчик температуры или освещённости, прописываем зависимость скважности на выходе от показаний датчиков и — готова регулировка с обратной связью
Меняем скважность в коде — меняется и скважность на выходе. Добавляем датчик температуры или освещённости, прописываем зависимость скважности на выходе от показаний датчиков и — готова регулировка с обратной связью
Принцип действия ДПТ
ДПТ, как и любой современный мотор, работает на основе «Правила левой руки», с которым все знакомы еще со школы и закона Фарадея. При подключении тока к нижней обмотке якоря в одном направлении, а к обмотке верхней – в другом, якорь начинает вращаться, а уложенные в его пазах проводники – выталкиваться магнитным полем статора или обмоток корпуса двигателя постоянного тока. Вправо выталкивается нижняя часть, а влево – верхняя. В результате якорь вращается до тех пор, пока его части не поменяются местами. Чтобы добиться непрерывного вращения, необходимо полярность обмотки якоря регулярно менять местами. Как раз этим и занимается коллектор, коммутирующий при вращении обмотки якоря. На коллектор от источника подается напряжение через пару прижимных щеток из графита.




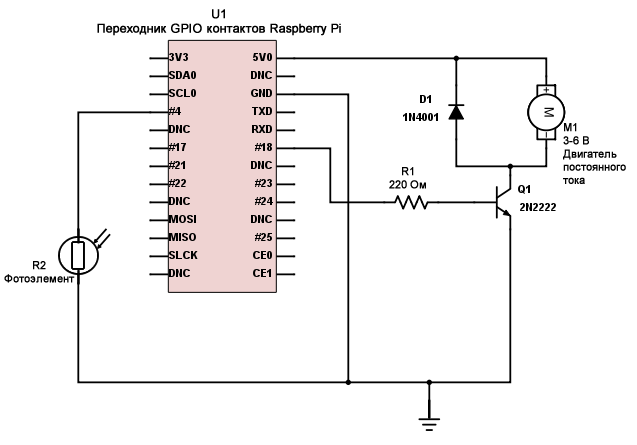
Управление двигателем при помощи биполярного транзистора
Использование биполярного транзистора в качестве надежного переключателя — один из способов управления двигателем. Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Полупроводниковый триод должен иметь соответствующий коллекторный ток и оптимальные максимальные значения, а также выделяемую мощность:
P = Uкэ × Iк .
Одной из проблем, возникающих в процессе использования биполярных полупроводниковых триодов, является избыточный базовый ток.
Схема управления
Как правило, токовое соотношение на выходном сигнале и входном транзисторе составляет 100 hfe. Функционирование элемента в условиях насыщения вызывает сильное снижение коэффициента.
Оптимальным вариантом является транзисторное комбинирование, или высокоэффективный транзистор Дарлингтона, который характеризуется высокими показателями токового усиления и незначительной скоростью работы.
Электробайк. Контроллер двигателя своими руками +39
- 26.04.17 10:47
•
makarenko
•
#288534
•
Гиктаймс
•
•
16700
DIY или Сделай сам, Электроника для начинающих, Энергия и элементы питания, Блог компании Mail.Ru Group

Как вы уже знаете из прошлых постов, у нас в компании есть DIY-движение. В свободное от работы время коллеги занимаются фрезеровкой печатных плат в домашних условиях, делают тепловизор на FLIR Lepton, а также решают семейные разногласия с помощью 4 контроллеров и 2 умных часов. Продолжим серию увлекательный историй! Сегодня я расскажу, как сделать контроллер к трехфазному двигателю электровелосипеда своими руками. Целью создания такого контроллера было:
- Изучение работы трехфазного мотора под управлением контроллера.
- Большинство контроллеров для электровелосипедов, представленных на рынке, — китайские. Они хоть и относительно дешевые (около 2.000 руб в зависимости от мощности), но являются неведомой коробкой, в которой неизвестно что происходит. И сразу к ней возникает очень много вопросов — экономично ли она потребляет и распределяет ток, какой у нее запас мощности, почему так сильно перегревается, преждевременно срабатывает защита по току и т.д.
В тоже время на рынке представлены европейские качественные контроллеры для электробайков. Они оснащаются расширенными функциями, работают на разных напряжениях и токах и их можно программировать. Устанавливаются они на сверхмощные электровелосипеды. Но цена у них кусается — 10-20 тыс. рублей.
В итоге я решил пойти своим путем: разобраться в устройстве контроллера, сделать его прототип, а затем попытаться сделать контроллер качественнее китайского контроллера. На текущий момент проект у меня в разработке только и на уровне прототипа, готового варианта пока нет. Буду рад услышать ваши комментарии и советы.
Итог
Главное преимущество контроллера на базе MC33035 — это простота в использовании. Просто покупаете микросхему, собираете Н-мост, спаиваете всё на плату с небольшой обвязкой — и контроллер готов. Если нужно просто запустить двигатель с ШИМ-сигналом и управлять им — оптимальный вариант.
Контроллер на базе Ардуино — вариант сложнее, понадобится писать логику, обеспечивать дополнительные защиты контроллера. Но для экспериментов, прототипов, дополнительного функционала, использования различных режимов работы двигателя — подходящий вариант. Поэтому я решил пока отложить MC33035 и продолжить работу с Ардуино.





