Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
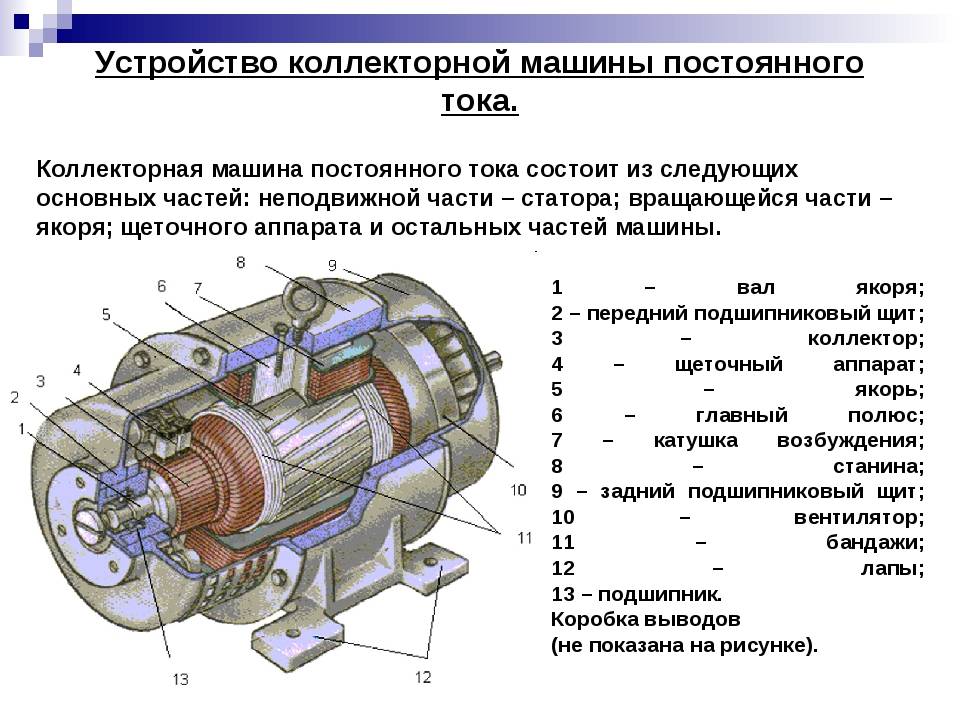
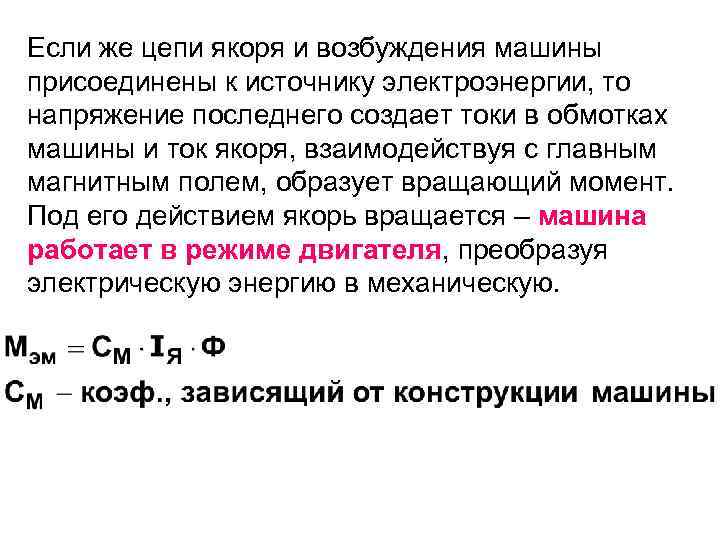
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:

- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.

Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.

Рисунок 3. Ротор с тремя обмотками

Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.

Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
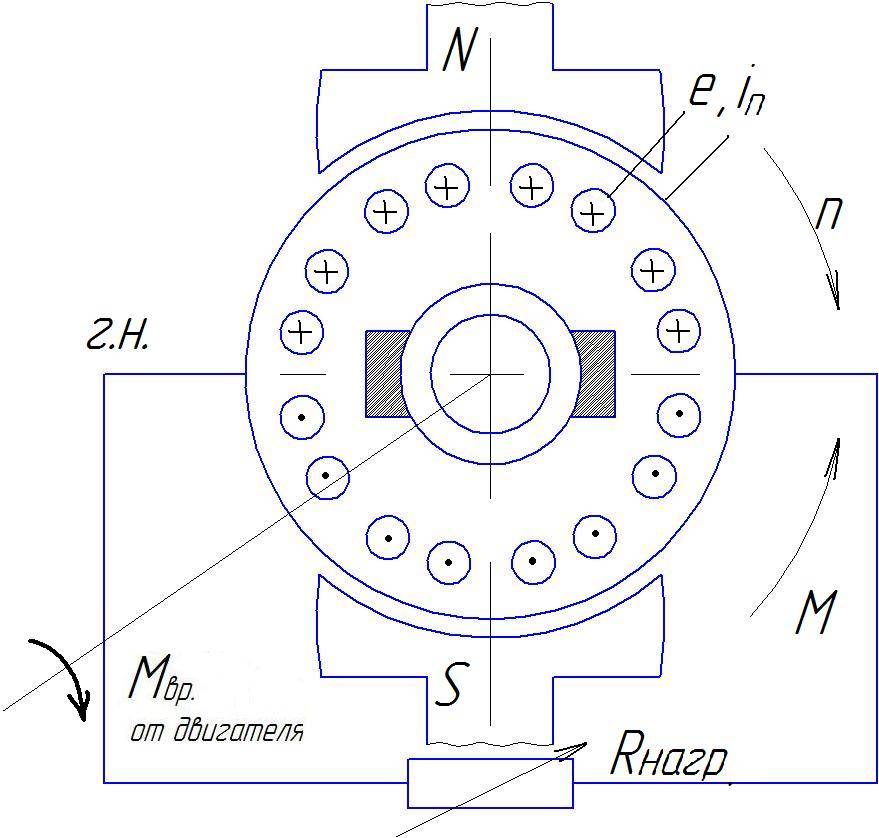
7.8. ТАХОГЕНЕРАТОРЫ ПОСТОЯННОГО ТОКА
Тахогенераторами называют электрические машины малой мощности, работающие
в генераторном режиме и служащие для преобразования частоты его вращения
в электрический сигнал.
Тахогенераторы постоянного тока по принципу действия и конструктивному
оформлению являются электрическими коллекторными машинами.
Выходной характеристикой тахогенератора является зависимость величины
на-пряжения на зажимах якоря Uя от частоты его вращения n при постоянном
магнитном потоке возбуждения Ф и постоянном сопротивлении нагрузки Rнагр
На рис. 7.8.1 показана выходная характеристика тахогенератора при различных
Rнагр.
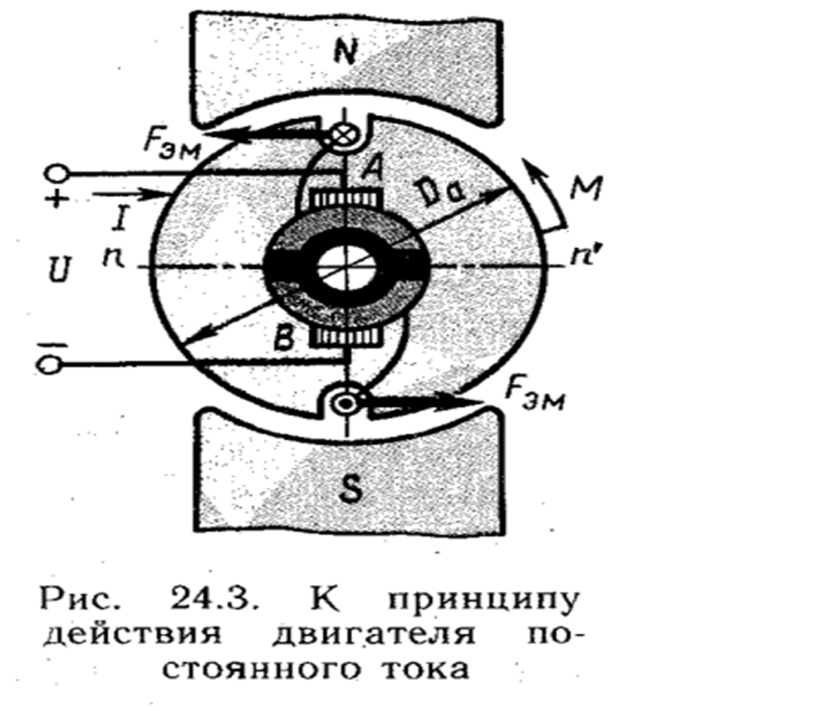
Принцип работы
На провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами.
Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
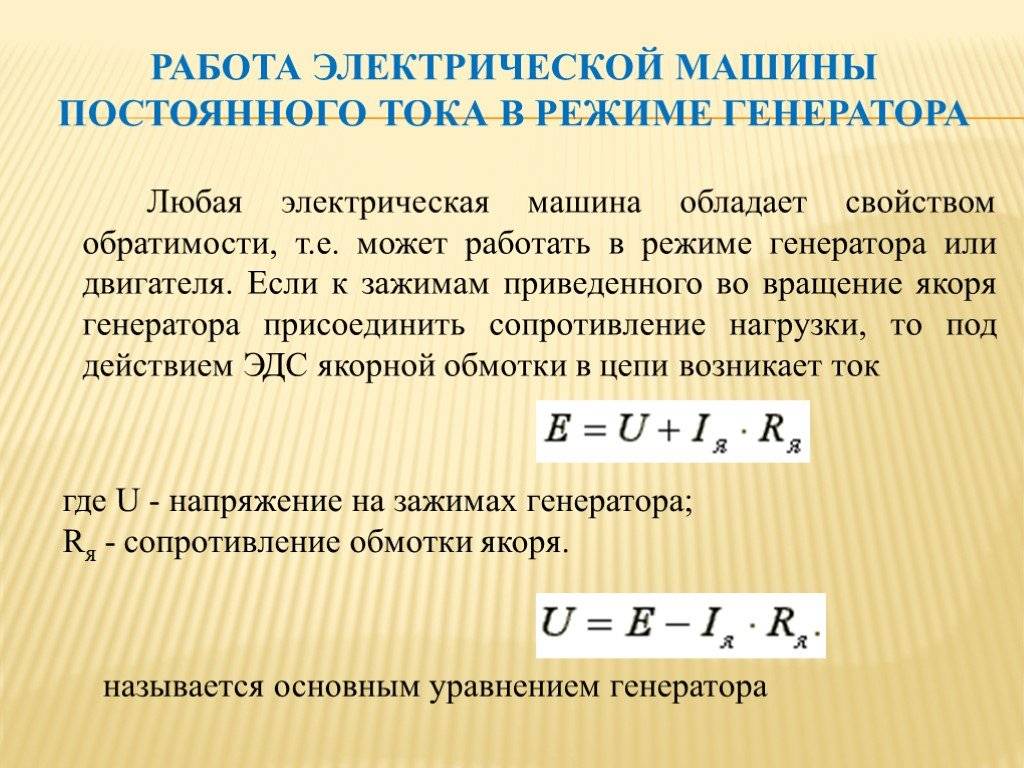
Работа машины постоянного тока в режиме генератора
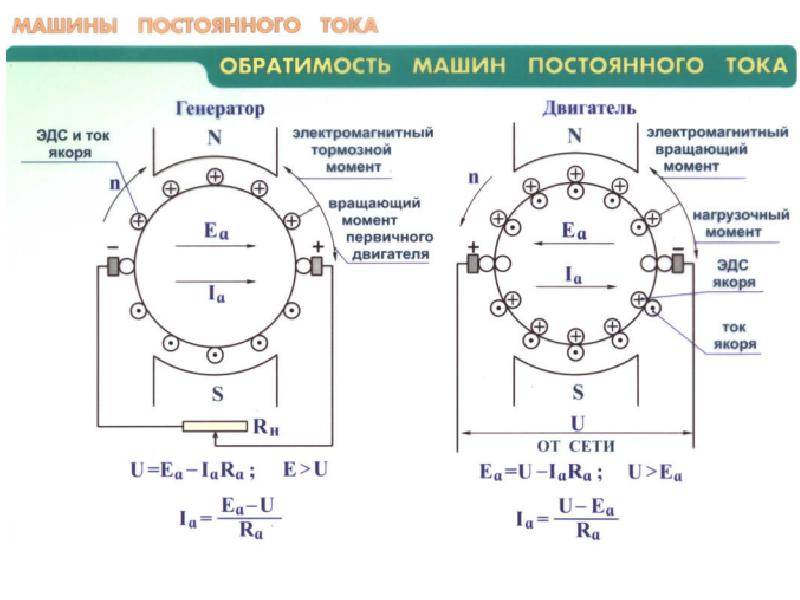
§ 110. РАБОТА МАШИНЫ ПОСТОЯННОГО ТОКА В РЕЖИМЕ ГЕНЕРАТОРА Якорь генератора приводится во вращение каким-либо двигателем, развивающим вращающий момент М1. При перемещении проводников обмотки якоря в магнитном поле полюсов в них индуктируется э.д.с, направление которой определяется правилом правой руки (рис. 142). Если якорь вращается с числом оборотов в минуту п, то в его обмотке индуктируется э. д. с.
Если обмотку якоря через щетки замкнуть на какой-либо приемник энергии г (сопротивление нагрузки), то через этот приемник и обмотку якоря будет протекать ток Iя, который в обмотке якоря имеет направление, совпадающее с направлением э.д.с. В результате взаимодействия этого тока с магнитным полем полюсов создается электромагнитный момент Мэ, направление которого определяется правилом левой руки.
Таким образом, развиваемый машиной электромагнитный момент является тормозным, направленным встречно направлении вращения якоря машины, так что для вращения последнего первичный двигатель должен развивать вращающий момент М1 достаточный для преодоления электромагнитного тормозного момента,
следовательно, машина потребляет механическую энергию.
В случае равновесия моментов, т. е. М1== Мэ, якорь машины вращается с неизменно скоростью. При нарушении равновесия моментов число оборотов якоря начнет изменяться. Если почему-либо момент первичного двигателя уменьшится, т. е. станет меньше электромагнитного момента генератора (М1 Мэ) число оборотов якоря, а также э. д. с. и ток в его обмотке будут увеличиваться, что вызывает увеличение тормозного электромагнитного момента.
При нарушении равновесия моментов число оборотов якоря, э.д.с. и ток в его обмотке претерпевают изменения до восстановления равновесия моментов, т. е. пока электромагнитный момент генератора не станет равным вращающему моменту первичного двигателя.
Таким образом, любое изменение момента первичного двигателя, т. е. потребляемой генератором мощности, вызывает соответствующее изменение как электромагнитного момента генератора, так и вырабатываемой им мощности. Так же при изменениях нагрузки генератора потребуется соответствующее изменение момента первичного двигателя для поддержания постоянства числа оборотов якоря генератора.
Ток обмотки якоря Iя, протекающий при нагрузке генератора, встречает на своем пути сопротивление внешней нагрузки rн, сопротивление обмотки якоря rоб и сопротивление переходных контактов между щетками и коллектором rщ. Обозначив через rя внутреннее сопротивление машины, представляющее собой сумму сопротивлений обмотки якоря и щеточных контактов (rоб+rщ), для тока в якоре можем записать следующее выражение:
Сопротивление rщ непостоянно и зависит от большого числа факторов, как-то: величины и направления тока, состояния коллектора, силы нажатия щеток на коллектор, скорости вращения, радение напряжения в щеточных контактах остается примерно нанесенным при изменениях нагрузки (принимается равным 2 в на пару угольных и графитных щеток).
Поэтому внутреннее сопротивление машины rя также не являйся величиной постоянной при изменении нагрузки генератора.
Так как Iяrн=U, где (U— напряжение на зажимах генератора при нагрузке, то получим следующее уравнение равновесия э.д.с. лля генератора:




Из уравнения равновесия э.д.с. легко получить уравнение мощностей, т. е.
где Р2 — полезная мощность генератора, отдаваемая потребителю электрической энергии,
Рэ— внутренняя или электромагнитная мощность генератора, преобразованная им в электрическую,
Роб —потери мощности в обмотке якоря и щеточных контактах.
При холостом ходе генератора электромагнитная мощность равна нулю (Рэ=0), но для вращения якоря машины первичный двигатель должен затратить некоторую мощность Р, расходуемую на покрытие потерь холостого хода. Мощность Р складывается из потерь механических на трение в подшипниках и трение о воздух вращающихся частей машины Рмех и из потерь в стали на
гистерезис и вихревые токи Pст.В генераторах с самовозбуждением мощность Р включает также мощность, затраченную на создание магнитного потока, т. е. на возбуждение машины.
При нагрузке генератора первичный двигатель затрачивает мощность Р1 = Рэ + Ро.
Электромагнитный момент машины
где
— угловая скорость якоря.
то электромагнитный момент машины определится следующим выражением:
Величины а, р
иN постоянны для данной машины, поэтому выражение представляет собой некоторый постоянный для данной машины коэффициент и электромагнитный момент равен:
Петлевые и волновые обмотки якоря
Это два основных типа обмоток, каждый из которых имеет несколько разновидностей. Мы рассмотрим их простейшие варианты. Слева на рисунке ниже показана форма секций, из которых состоит простая петлевая обмотка якоря машин постоянного тока. Как можно увидеть, такая же форма секций характерна для волновой обмотки.

В первом варианте один (начальный, стартовый) вывод каждой двухвитковой секции подключен к i-й пластине коллектора, а второй (конечный, завершающий) вывод соединен на соседней (i+1)-й пластине коллектора с начальным выводом следующей секции (см. рисунок выше). Таким образом, выводы каждой секции присоединены к двум рядом расположенным пластинам, а сама секция, состоящая из двух пазовых сторон и двух лобовых частей по форме напоминает петлю (отсюда и название обмотки).
Секция волновой обмотки имеет выводы, присоединенные не к соседним пластинам коллектора, а к разнесенным на определенный шаг, называемый шагом обмотки по коллектору ук. Для простой петлевой обмотки ук=1, а для простой волновой — ук=(К±1)/р, где К – число пластин коллектора, р- число пар главных полюсов. Как видно из рисунка, вследствие такого способа соединения секции приобретают форму, похожую на полуволну синусоиды, что и обусловило название обмотки.
Вращающиеся электрические машины
Вращающаяся электрическая машина
— электротехническое устройство, предназначенное для преобразования энергии на основе электромагнитной индукции и взаимодействия магнитного поля с электрическим током, содержащее, по крайней мере, две части, участвующие в основном процессе преобразования и имеющие возможность вращаться или поворачиваться относительно друг друга .
Вращающаяся машина постоянного тока
, или машина постоянного тока — вращающаяся электрическая машина, основной процесс преобразования энергии в которой обусловлен потреблением или генерированием только постоянного электрического тока.
Вращающаяся машина переменного тока
— вращающаяся электрическая машина, основной процесс преобразования энергии в которой обусловлен потреблением или генерированием переменного электрического тока.
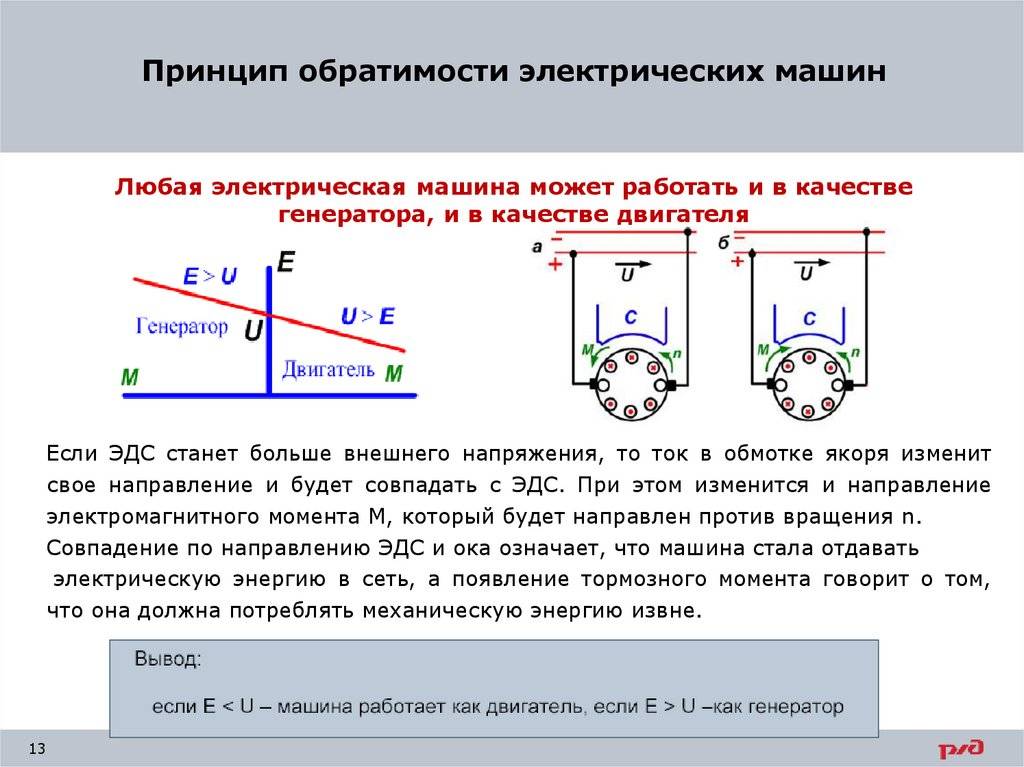
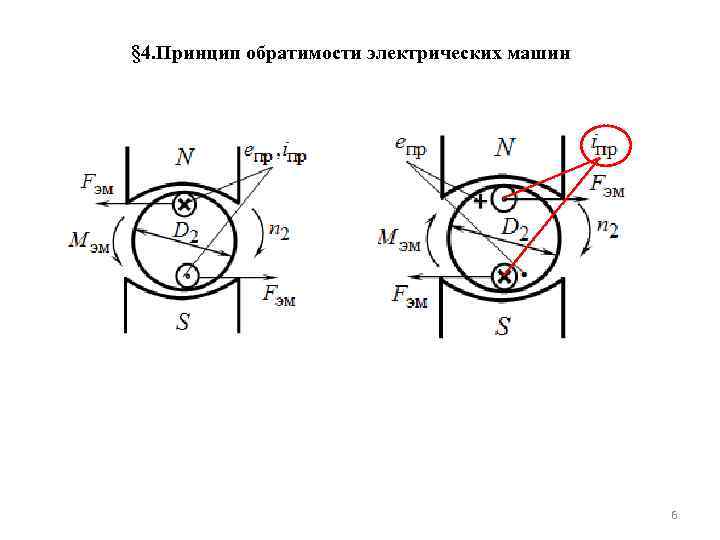
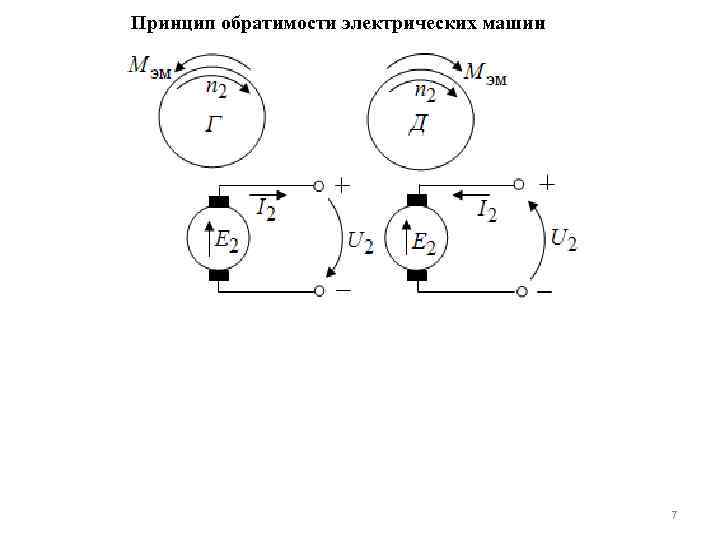
Принцип обратимости электрических машин
Агрегаты данной категории имеют различное строение и различные принципы действия, но всем им присущ принцип обратимости, когда одна и та же машина может выступать и в качестве двигателя, и в качестве генератора, и в качестве электромагнитного тормоза.
Такая широкая функциональность установок делает их особенно удобными для использования на различных производственных объектах, поскольку в этой сфере очень важна универсальность установок, их взаимозаменяемость и высокая продуктивность.
Все ныне существующие виды электрических машин довольно востребованы, потому сфера изготовления подобных агрегатов развивается довольно быстро.
Виды КД
Классифицировать данные устройства принято по типу питания, в зависимости от этого различают две группы КД:
- Постоянного тока. Такие машины отличаются высоким пусковым моментом, плавным управлением частоты вращения и относительно простой конструкцией.
- Универсальные. Могут работать как от постоянного, так и переменного источника электроэнергии. Отличаются компактными размерами, невысокой стоимостью и простотой управления.
Первые, делятся на два подвида, в зависимости от организации индуктора он может быть на постоянных магнитах или специальных катушках возбуждения. Они служат для создания магнитного потока, необходимого для образования вращательного момента. КД, где используются катушки возбуждения, различают по типам обмоток, они могут быть:
- независимыми;
- параллельными;
- последовательными;
- смешанными.
Разобравшись с видами, рассмотрим каждый из них.
КД универсального типа
На рисунке ниже представлен внешний вид электромашины данного типа и ее основные элементы конструкции. Данное исполнение характерно практически для всех КД.

Конструкция универсального коллекторного двигателя
Обозначения:
- А – механический коммутатор, его также называют коллектором, его функции были описаны выше.
- В – щеткодержатели, служат для крепления щеток (как правило, из графита), через которые напряжение поступает на обмотки якоря.
- С – Сердечник статора (набирается из пластин, материалом для которых служит электротехническая сталь).
- D – Обмотки статора, данный узел относится к системе возбуждения (индуктору).
- Е – Вал якоря.
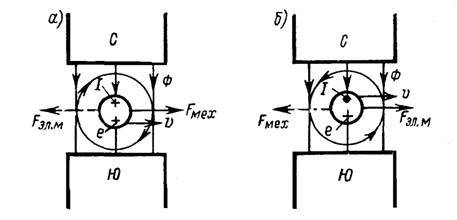
Преобразование энергии
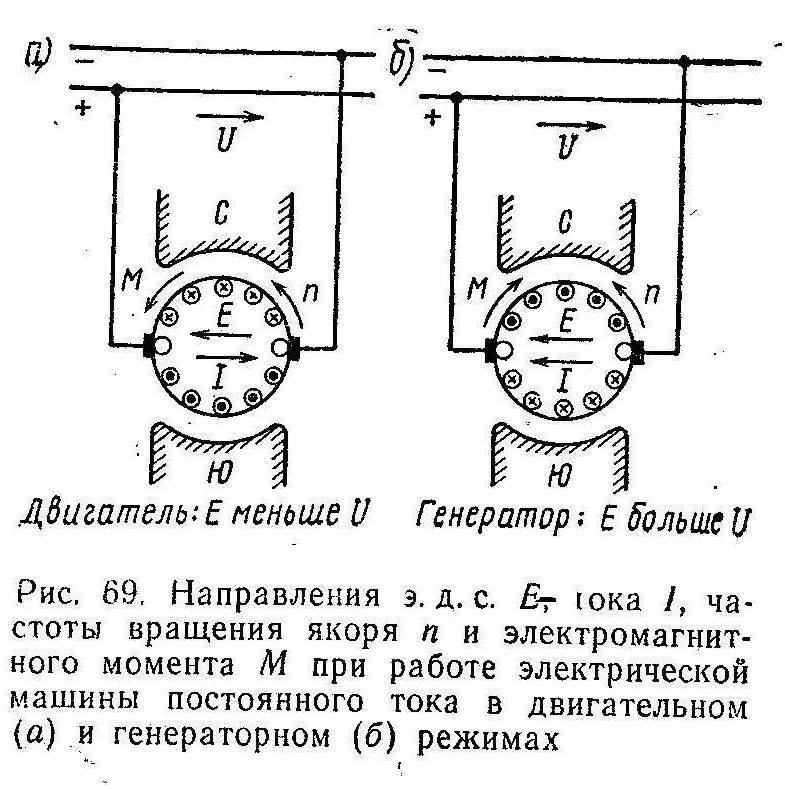
На рисунке 5 показаны направления действия механических и электрических величин в якоре генератора и двигателя постоянного тока.
Рисунок 5. Направление э. д. с., тока и моментов в генераторе (а) и двигателе (б) постоянного тока
Согласно первому закону Ньютона в применении к вращающемуся телу, действующие на это тело движущие и тормозные вращающие моменты уравновешивают друг друга. Поэтому в генераторе при установившемся режиме работы электромагнитный момент
| Mэм = Mв – Mтр – Mс, | (7а) |
где Mв – момент на валу генератора, развиваемый первичным двигателем, Mтр – момент сил трения в подшипниках, о воздух и на коллекторе электрической машины, Mс – тормозной момент, вызываемый потерями на гистерезис и вихревые токи в сердечнике якоря. Эти потери мощности появляются в результате вращения сердечника якоря в неподвижном магнитном поле полюсов. Возникающие при этом электромагнитные силы оказывают на якорь тормозящее действие и в этом отношении проявляют себя подобно силам трения.
В двигателе при установившемся режиме работы
| Mэм = Mв + Mтр + Mс, | (7б) |
где Mв – тормозной момент на валу двигателя, развиваемый рабочей машиной (станок, насос и т. п.).
В генераторе Mэм является тормозным, а в двигателе – вращающим моментом, причем в обоих случаях Mв и Mэм противоположны по направлению.
Развиваемая электромагнитным моментом Mэм мощность Pэм называется электромагнитной мощностью и равна
| Pэм = Pэм × Ω, | (8) |
где
| Ω = 2 × π × n, | (9) |
представляет собой угловую скорость вращения.
Подставим в выражение (8) значение Mэм и Ω из равенств (5) и (9) и учтем, что линейная скорость на окружности якоря
Тогда получим
| Pэм = 2 × B × l × Dа × Iа × π × n = 2 × B × l × v × Iа |
или на основании выражения (1)
| Pэм = Eа × Iа. | (10) |
В обмотке якоря под действием э. д. с. Eа и тока Iа развивается внутренняя электрическая мощность якоря





| Pа= Eа × Iа. | (11) |
Согласно равенствам (10) и (11), Pэм = Pа, т. е. внутренняя электрическая мощность якоря равна электромагнитной мощности, развиваемой электромагнитным моментом, что отражает процесс преобразования механической энергии в электрическую в генераторе и обратный процесс в двигателе.
Умножим соотношения (3) и (6) на Iа. Тогда для генератора будем иметь
| Uа × Iа = Eа × Iа – Iа2 × rа | (12) |
и для двигателя
| Uа × Iа = Eа × Iа + Iа2 × rа. | (13) |
Левые части этих выражений представляют собой электрические мощности на зажимах якоря, первые члены правых частей – электромагнитную мощность якоря и последние члены – электрические потери мощности в якоре.
Приведенные соотношения действительны и при более сложной обмотке якоря, так как э. д. с. и моменты отдельных проводников складываются. Эти соотношения являются выражением закона сохранения энергии и отражают процесс преобразования энергии в машине постоянного тока.
Согласно им механическая мощность, развиваемая на валу генератора первичным двигателем, за вычетом механических и магнитных потерь, превращается в электрическую мощность в обмотке якоря, а электрическая мощность за вычетом потерь в этой обмотке выдается во внешнюю цепь. В двигателе электрическая мощность, подводимая к якорю из внешней цепи, частично расходуется на потери в обмотке якоря, а остальная часть этой мощности превращается в мощность электромагнитного поля и последняя – в механическую мощность, которая за вычетом потерь на трение и потерь в стали якоря передается рабочей машине.
Установленные выше применимо к машине постоянного тока общие закономерности превращения энергии в равной степени относятся также к машинам переменного тока.
Способы борьбы с реакцией якоря
Наиболее простым и первым из появившихся способов стало увеличение воздушного зазора от середины к краям наконечников полюсов, т. е. выполнение расходящегося зазора. При этом увеличивалось магнитное сопротивление потоку реакции якоря, и воздействие его на поле возбуждения уменьшалось. Но сопротивление росло и для потока возбуждения, что вынуждало увеличивать габариты катушек на главных полюсах.
Для ослабления потока якоря при изготовлении главных полюсов используется электротехническая сталь с магнитной анизотропией ее свойств (магнитной проницаемости) вдоль и поперек оси полюсов. Полюсы из такой стали хорошо проводят продольный поток возбуждения и плохо — поперечный поток якоря. Однако такая сталь очень дорога, а ее свойства сильно зависят от температуры и изменяются с течением времени.
Наконец был найден радикальный способ борьбы с реакцией якоря машины постоянного тока. Устройство и принцип действия ее при этом почти не изменились, но добавилась еще одна обмотка – компенсационная. Она размещается в пазах, выполняемых в наконечниках главных полюсов (или в пазах статора вместе с обмоткой возбуждения при неявнополюсной конструкции), как показано на рисунке ниже, и присоединяется последовательно к обмотке якоря, т. е. по ним проходит одинаковый ток.

Однако направление обтекания им витков компенсационной обмотки выбрано таким образом, что возбуждаемый ею магнитный поток направлен навстречу потоку реакции якоря и компенсирует его.
Все современные электрические машины постоянного тока, имеющие среднюю и большую мощность, оснащаются такой обмоткой.
Классификация МПТ
В электромашиностроении и теории электромашин принято разделять МПТ на устройства с явно и с неявно выраженными полюсами возбуждения, с цилиндрической или многогранной станиной, с возбуждением постоянным током или постоянными магнитами, с механическим коммутатором-коллектором на якоре или бесконтактные. Назначение машин постоянного тока разделяет их на общепромышленные и специализированные. Среди последних можно назвать, например, тяговые ДПТ, используемые в рельсовом транспорте. Выделяются также металлургические ДПТ, в особенности двигатели для прокатных станов и т. д.
Как известно, обмотки машин постоянного тока разделяются на обмотки возбуждения (ОВ) и якоря (ОЯ). Первые служат для возбуждения магнитного поля устройства, а вторые — для отбора мощности от питающей электросети в режиме двигателя или для питания электрической нагрузки в режиме генератора. Существуют еще и обмотки дополнительных полюсов, используемые для облегчения процесса коммутации.
Электрические машины постоянного тока независимо от того, являются ли они генераторами или двигателями, могут быть классифицированы на основе схем соединения их обмоток возбуждения и якоря. Они могут составлять единую электрическую цепь или же вообще не иметь электрической связи (независимое возбуждение). Этот принцип классификации делит МПТ на два основных типа. Вы поймете дальнейшую их классификацию из представленной ниже схемы.

Устройство машины постоянного тока
ГПТ может использоваться как ДПТ без каких-либо конструктивных изменений. Конечно, промышленностью выпускаются машины, предназначенные для работы в качестве двигателей, и машины, являющиеся генераторами. Однако отличия между ними состоят в конструкции отдельных частей, и на этапе общего ознакомления могут быть проигнорированы. Следовательно, далее будем рассматривать устройство машины постоянного тока в общем, без привязки к режиму ее работы.
Ниже на рисунке показан поперечный разрез простой МПТ с двумя парами явно выраженных полюсов. Конструкция ее содержит две основные части: статор и якорь. Рассмотрим, из каких деталей они состоят.

Статор содержит станину, а также главные и находящиеся между ними дополнительные полюсы (на рисунке не показаны).
Станина – это внешняя конструктивная оболочка МПТ. Она бывает литой из чугуна (у машин старых конструкций) или сварной из толстого листа стали. Станина механически прочно скрепляет всю сборку МПТ. Кроме того, она служит магнитопроводом для магнитного потока, производимого главными полюсами.
Последние прикреплены к станине с помощью винтов или сварки. Основное их назначение – нести катушки обмотки возбуждения, намотанные на них и соединенные последовательно между собой таким образом, чтобы магнитная полярность полюсов чередовалась, т. е. после «северного» полюса следовал бы «южный» и т. д.
Полюсные наконечники (башмаки), являющиеся расширением главных полюсов, служат двум целям: для предотвращения соскальзывания катушек и для равномерного распределения поля возбуждения на большей части окружности воздушного зазора.
Якорь машины постоянного тока состоит из сердечника с обмоткой, втулки и вала. Сердечник – это стальной каркас цилиндрической формы, сложенный из тонких электрических листов стали, покрытых с обеих сторон электроизоляционным лаком. Это делается для предотвращения появления вихревых токов, стремящихся замкнуться в толще сердечника. В пазах его уложены секции петлевой или волновой обмотки якоря, коллектор машины постоянного тока и щетки. Обмотку якоря нужно присоединить к внешней электросети постоянного тока. Но нельзя непосредственно соединить выводы обмотки с сетевым вводом, потому что она вращается. Поэтому между сетью и обмоткой якоря установлен коммутатор-коллектор, представляющий собой множество изолированных друг от друга пластин из меди, образующих внешнюю цилиндрическую поверхность, разделенную изоляционными дорожками. Неподвижные контактные щетки скользят по ней, когда якорь с коллектором вращаются. Таким образом неподвижные щетки физически соприкасаются с вращающейся обмоткой якоря, а с их помощью уже можно выполнить подключение к внешней сети машины постоянного тока.
Способы электрического торможения электроприводов
Для того чтобы быстро остановить устройство или обеспечить постоянную скорость вращения используют электрические способы остановки. В зависимости от схемы включения тормозные режимы подразделяют на:
- противовключения;
- динамический;
- рекуперативный.
Противовключения
Режим противовключения применяется при необходимости быстрой остановки механизма. Представляет собой смену полярности на обмотке якоря двигателя постоянного тока или переключения двух фаз на обмотках асинхронного электродвигателя.
В этом случае ротор вращается в противоположном направлении магнитного поля статора. Вращение ротора замедляется. При скорости вращения близкой к нулю с реле контроля скорости поступает сигнал, отключая механизм от сети.
На нижеприведенном рисунке представлена схема противовключения асинхронного электромотора.
После переключения обмоток возникает повышенное действующее напряжение и увеличение тока. Для его ограничения, в обмотки ротора или статора устанавливают дополнительные резисторы. Они ограничивают токи в обмотках в режиме торможения.
Динамическая остановка электропривода
Этот способ применяют на асинхронных машинах, подключенных к сети переменного тока. Он заключается в отключении обмоток от сети переменного напряжения и подачи постоянного тока на обмотку статора.
На вышеприведенном рисунке представлена схема торможения трехфазного двигателя постоянным током.
Подача постоянного напряжения осуществляется с помощью понижающего трансформатора для динамического торможения. Пониженное переменное напряжение преобразуется в постоянное диодным мостом и подается на статорную обмотку. Для торможения электромотора может применяться дополнительный источник постоянного тока.
При этом ротор может быть выполнен в виде «беличьей клетки» или ее обмотку подключают к добавочным резисторам.
Постоянное напряжение создает неподвижный магнитный поток. При вращении ротора в нем наводится ЭДС, т.е. электромотор переходит в режим генератора. Возникающая электродвижущая сила рассевается на обмотке ротора и добавочных резисторах. Создается тормозной момент. В момент остановки механизма постоянное напряжение отключается по сигналу реле скорости.
Механизмы, где применяется электродвигатель с самовозбуждением, динамическую остановку выполняют с помощью подключения конденсаторов. Они соединяются треугольником или звездой.
Схема приведена на нижеприведенном рисунке.
На выбеге остаточная энергия магнитного поля переходит в заряд конденсаторов, а затем она питает обмотку статора. Возникающий тормозной эффект останавливает механизм. Конденсаторная батарея может быть подключена постоянно или подсоединяться в момент отключения от сети. Такая схема получила название “конденсаторное торможение асинхронного двигателя”.
Если необходимо быстро остановить двигатель, то после отключения от сети, замыкают контакты накоротко без гасящих резисторов. При соединении обмоток закорачиванием в них возникают большие токи. Для уменьшения токов к обмоткам подключают токоограничивающие резисторы.
На нижеприведенном рисунке представлена схема с токоограничивающими резисторами.
Электродвижущая сила якоря
| Рисунок 1. Определение э. д. с. якоря и электромагнитного момента |
Электродвижущую силу якоря (э. д. с. якоря) обозначим буквой N число активных проводников обмотки и рассчитаем э. д. с. якоря Eа в предположении, что y1 = τ и щетки установлены на геометрической нейтрали. Тогда э. д. с. всех N / 2а проводников параллельной ветви складываются арифметически и для вычисления Eа можно просуммировать э. д. с. N / 2p проводников, расположенных под одним полюсом, и умножить результат на 2p / 2a. Таким образом,
| (1) |
где Bδk – значение индукции под k-м проводником на протяжении полюсного деления (рисунок 1).
При достаточно большом N/2p можно положить (рисунок 1)
где Bср – среднее значение магнитной индукции на протяжении полюсного деления, равное
Кроме того, окружная скорость якоря
v = 2p × τ × n .
После подстановки этих величин в выражение (1) получим
| (2) |
или
| Eа = cе × Фδ × n , | (3) |
где
| cе = p × N / a | (4) |
– постоянная для каждой машины величина.
Если вместо величины n ввести в формулу (2) угловую скорость вращения
| Ω = 2 × π × n , | (5) |
то получим
| Eа = cм × Фδ × Ω , | (6) |
где
| (7) |
Как следует из выражений (3) и (6), э. д. с. Eа пропорциональна основному магнитному потоку и скорости вращения и не зависит от формы кривой распределения индукции в воздушном зазоре.





| Рисунок 2. Определение потока, сцепляющегося с обмоткой при неполном шаге |
При укороченном или удлиненном шаге обмотки в выражения (2), (3) и (6) вместо Фδ нужно подставлять значение потока, с которым сцепляется секция при симметричном ее расположении относительно полюса (рисунок 2). При этом удлинение шага на некоторую величину Δ равноценно укорочению шага на такую же величину. При наличии скоса пазов нужно исходить из этого же принципа. Однако в обычных условиях, когда удлинение или укорочение шага, а также скос пазов малы, влияние их мало и не учитывается.
Когда щетки сдвинуты с геометрической нейтрали, э. д. с. меньше. При этом в выражения (2), (3) и (6) нужно подставлять значение потока, с которым сцепляется секция в момент ее замыкания накоротко щетками. Если щетки сдвинуты с нейтрали на половину полюсного деления, то Eа = 0.
Области применения электрических машин
Современные электрические машины имеют самое разнообразное конструктивное исполнение и могут реализовывать различные роды напряжения и тока, а также различные виды движения — вращательное, колебательное, линейное и т.д. Диапазон мощностей современных электрических машин составляет 10-17 — 109 Вт. На рисунке 1 показаны области распространения и зоны использования емкостных (график 1), индуктивно-емкостных (график 2) и индуктивных (график 3) электрических машин. Электрическая машина является весьма экономичным преобразователем энергии.

Рисунок 1 – Области распространения электрических машин
Для управления современными электрическими машинами используются сложные электронные системы, которые конструктивно объединяются с электромеханическим преобразователем и образуют так называемую электромеханотронную систему, выступающую как единый технический комплекс. Все это существенно расширяет функциональные возможности электрических машин и обеспечивает их широкое внедрение во все сферы производственной и бытовой деятельности человечества .
7.7. ОДНОЯКОРНЫЕ ПРЕОБРАЗОВАТЕЛИ
Для преобразования переменного тока в постоянный, как известно, используют
выпрямители. Преобразование постоянного тока в переменный можно осуществить
электромашинными преобразователями. Каскад из двух машин: (асинхронный
двигатель переменного тока и генератор постоянного тока) вполне решают
эту задачу.
Но бывает ситуация, когда необходимо преобразовать постоянный ток низкого
напряжения в постоянный ток повышенного напряжения. Делается это в одной
комбинированной машине, состоящей из двигателя и генератора постоянного
тока с общей магнитной системой. Со стороны низкого напряжения это электродвигатель,
а со стороны повышенного напряжения – генератор постоянного тока с независимым
возбуждением.
В одних и тех же пазах якоря преобразователя заложены самостоятельные
обмотки низкого и повышенного напряжения. Концы обмоток присоединены
к соответствующему коллектору (рис. 7.7.1), причем обмотка повышенного,
напряжения имеет значительно большее число проводников, чем обмотка
низкого напряжения.
Одноякорные преобразователи широко применяются в авиационной технике,
а также в общепромышленных установках, где первичным источником постоянного
тока является аккумулятор.
Одноякорные преобразователи постоянного тока в трехфазный переменный
отличается от рассмотренного тем, что обмотка повышенного напряжения
состоит из
трех секций, смещенных друг от друга на 120°. Выводы секционных обмоток припаяны
к трем контактным кольцам и с помощью токосъемных щеток переменный ток
передается к потребителю.
Преимущества постоянного тока
- Главное преимущество электрической энергии постоянного тока – это отсутствие реактивной мощности. А это значит, что вся мощность, выработанная генератором, потребляется нагрузкой за вычетом потерь в проводах.
- Постоянный ток в отличие от переменного протекает по всему сечению проводника.
Указанные два пункта приводят к тому, что если передавать одну и ту же мощность при равных напряжениях постоянным и переменным токами, то потери мощности электроэнергии постоянным током были бы почти в два раза меньше, чем при переменном токе.
К тому же, если рассматривать такие бытовые электронные устройства как ноутбуки, компьютеры, телевизоры и т. п., то все они имеют блоки питания, преобразующие переменное напряжение 220 В (230 В) в постоянное напряжение более низкой величины. А такие преобразования связаны с частичной потерей мощности.
Кроме того, как было сказано ранее, трехфазный асинхронный двигатель (АД) можно подключить напрямую к сети 380 В, что вполне оправдано в том случае, когда не требуется изменять режим работы двигателя. Но если необходимо изменять частоту вращения его вала, то нужно на обмотки статора подавать напряжение, частота и амплитуда которого должны изменяться пропорционально, согласно закону Костенка. Для этого применяют трехфазные автономные инверторы (АИ), чаще всего инверторы напряжения. Такие инверторы должны получать питание от источника постоянного напряжения. Также следует заметить, что последним временем начали очень широко применяться солнечные батареи, которые вырабатывают постоянный ток. К тому же, значительно возросла мощность аккумуляторных батарей и повысилась емкость суперконденсаторов, которые также относятся к источникам постоянного тока и с каждым днем находят все большее практическое применение.





