Пуск с помощью пускового реостата
В этом случае в цепь вводится переменное сопротивление, которое на начальном этапе обеспечивает снижение токовой нагрузки, пока вращение ротора не достигнет установленных оборотов. По мере стабилизации ампеража до стандартной величины в реостате уменьшается сопротивление от максимального значения до минимального.
Расчет электрической величины в этом случае будет производиться по формуле:
В лабораторных условиях уменьшение нагрузки может производиться вручную – посредством перемещения ползунка реостата. Однако в промышленности такой метод не получил широкого распространения, так как процесс не согласовывается с токовыми величинами. Поэтому применяется регулировка по току, по ЭДС или по времени, в первом случае задействуется измерение величины в обмотках возбуждения, во втором, на каждую ступень применяется выдержка времени.
Оба метода используются для запуска электродвигателей:
- с последовательным;
- с параллельным возбуждением;
- с независимым возбуждением.
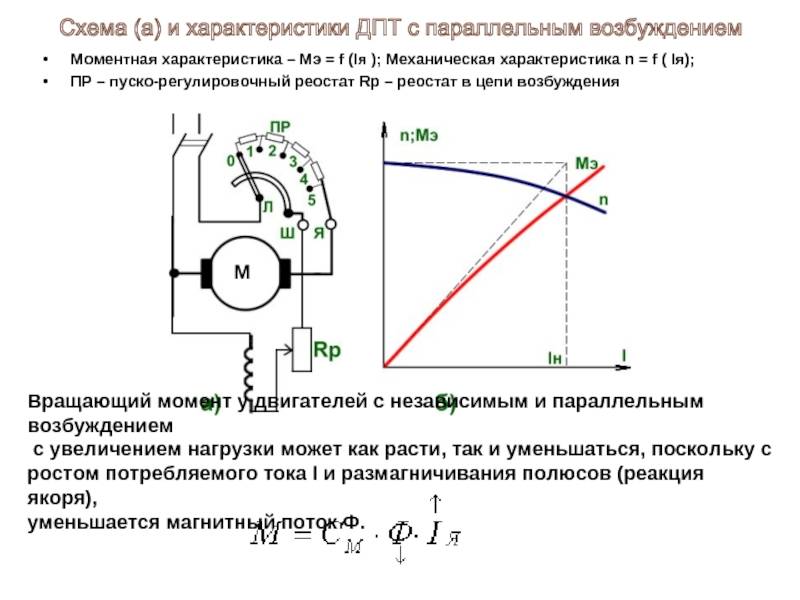
Запуск ДПТ с параллельным возбуждением
Такой запуск электродвигателя осуществляется посредством включения и обмотки возбуждения, и якорной к напряжению питания электросети, друг относительно друга они располагаются параллельно. То есть каждая из обмоток электродвигателя постоянного тока находятся под одинаковой разностью потенциалов. Этот метод запуска обеспечивает жесткий режим работы, используемый в станочном оборудовании. Токовая нагрузка во вспомогательной обмотке при запуске имеет сравнительно меньший ток, чем обмотки статора или ротора.
Для контроля пусковых характеристик сопротивления вводятся в обе цепи:
Рис 1. Запуск ДПТ с параллельным возбуждением
На начальном этапе вращения вала позиции реостата обеспечивают снижение нагрузки на электродвигатель, а затем их обратно выводят в положение нулевого сопротивления. При затяжных запусках выполняется автоматизация и комбинация нескольких ступеней пусковых реостатов или отдельных резисторов, пример такой схемы включения приведен на рисунке ниже:
Рис. 2. Ступенчатый пуск двигателя параллельного возбуждения
- При подаче напряжения питания на электродвигатель ток, протекающий через рабочие обмотки и обмотку возбуждения, за счет магазина сопротивлений Rпуск1, Rпуск2, Rпуск3 нагрузка ограничивается до минимальной величины.
- После достижения порогового значения минимума токовой величины происходит последовательное срабатывание реле K1, K2, K3.
- В результате замыкания контактов реле K1.1 шунтируется первый резистор, рабочая характеристика в цепи питания электродвигателя скачкообразно повышается.
- Но после снижения ниже установленного предела замыкаются контакты K2.2 и процесс повторяется снова, пока электрическая машина не достигнет номинальной частоты вращения.
Торможение электродвигателя постоянного тока может производиться в обратной последовательности за счет тех же резисторов.
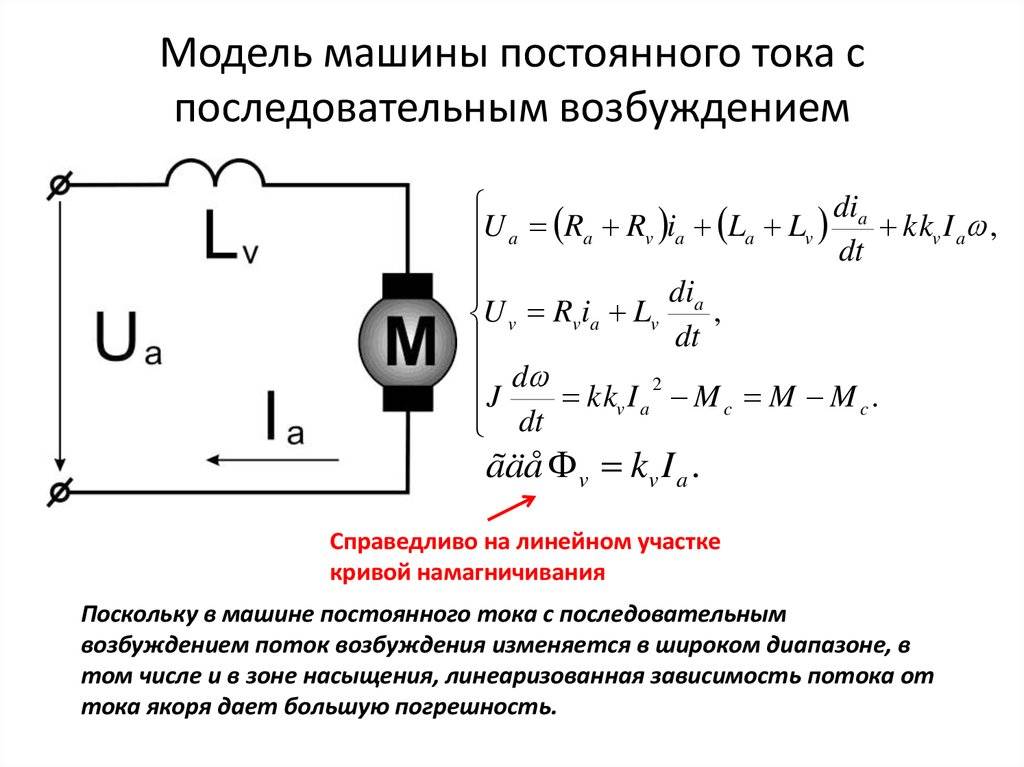
Запуск ДПТ с последовательным возбуждением
На рисунке выше приведена принципиальная схема подключения электродвигателя с последовательным возбуждением. Ее отличительная особенность заключается в последовательном соединении катушки возбуждения Lвозбуждения и непосредственно мотора, переменное сопротивление Rякоря также вводится последовательно.
По цепи обеих катушек протекает одинаковая токовая величина, эта схема обладает хорошими параметрами запуска, поэтому ее часто используют в электрическом транспорте. Такой электродвигатель запрещено включать без усилия на валу, а регулирование частоты осуществляется в соответствии с нагрузкой.
Пуск ДПТ с независимым возбуждением
Подключение электродвигателя в цепь с независимым возбуждением производится путем ее запитки от отдельного источника.
Рис. 4. Запуск ДПТ с независимым возбуждением
На схеме приведен пример независимого подключения, здесь катушка Lвозбуждения и сопротивление в ее цепи Rвозбуждения получают питание отдельно от обмоток двигателя током независимого устройства. Для обмоток двигателя также включается регулировочный реостат Rякоря. При этом способе запуска машина постоянного тока не должна включаться без нагрузки или с минимальным усилием на валу, так как это приведет к нарастанию оборотов и последующей поломке.
ДПТ со смешанным возбуждением
ДПТ со смешанным возбуждением (рис.4) имеет две ОВ, одна из которых соединена последовательна, а другая параллельно якорной цепи. При согласном соединении обмоток с увеличением нагрузки на валу растёт магнитный поток, что приводит к уменьшению частоты вращения. При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения. Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя.
2.77 (13 Голоса)
Вперед
студент группы № 533 преподаватель
Рудалев Е.
В. Мартынов
А. А.
Санкт-Петербург
2001.
Цели и задачи работы: Целью настоящей работы является исследование
рабочих
свойств двигателя постоянного тока с последовательным возбуждением,
в
установившемся режиме. (Сериесный двигатель.)
С.Д.
широко применяется в различных транспортных средствах. Отличительной
особенностью СД является зависимость магнитного потока от тока якоря.
Скорость
вращения, с уменьшением нагрузки на валу, резко увеличивается.
При
холостом ходе СД идет в разнос, что является опасным для механической
прочности
электродвигателя. Поэтому при пуске СД должен иметь минимальную нагрузку (0,2 /
0,25 )*IЯN , при этом скорость
вращения не должна превышать 1,5nN.
1.Снятие рабочих характеристик.
P1 , P2 , M , n , ζ =f (Iя) , при Uя = UяN
= 90 B.
P1=мощность, потребляемая двигателем;
P2=полезная мощность, снимаемая с вала двигателя;
M=полезный
момент, развиваемый двигателем;
ζ=коэффициент
полезного действия.
Таблица
№1.
Измерено. | Вычислено. | |||||||||
№ | Iя | n | P1 | P2 | Ω | M2 | ζ | Pст+Pмех | Pэл1 | ∑P |
А | Об/мин | Вт | Вт | Рад/с | Н*м | – | Вт | Вт | Вт | |
1 | 4 | 1750 | 360 | 210,68 | 183,17 | 1,15 | 0,59 | 45 | 104,32 | 149,32 |
2 | 3,5 | 1875 | 315 | 185,13 | 196,25 | 0,94 | 0,59 | 50 | 79,87 | 129,87 |
3 | 3 | 2062,5 | 270 | 156,82 | 215,88 | 0,73 | 0,58 | 54,5 | 58,68 | 113,18 |
4 | 2,5 | 2375 | 225 | 122,25 | 248,58 | 0,49 | 0,54 | 62 | 40,75 | 102,75 |
5 | 2 | 2750 | 180 | 81,92 | 287,83 | 0,28 | 0,46 | 72 | 26,08 | 98,08 |
Рабочие характеристики двигателя с последовательным
возбуждением.



2.Снятие характеристики регулирования.
N=f (Uя) СД при двух значениях момента нагрузки:
M2= M2N M2=0.5*M2N
Ua=90 B.=const.
Таблица
№2.
Измерено. | Вычислено. | |||||
№. | Iя | Uя | N | P2 | P1 | ζ |
A | B | Об/мин | Вт | Вт | – | |
M2= M2N | ||||||
1 | 4 | 90 | 1750 | 210,68 | 360 | 0,58 |
2 | 4 | 80 | 1562,5 | 174,68 | 320 | 0,54 |
3 | 4 | 70 | 1325 | 143,68 | 280 | 0,51 |
4 | 4 | 60 | 1150 | 106,68 | 240 | 0,44 |
5 | 4 | 50 | 950 | 73,68 | 200 | 0,37 |
M2=0.5*M2N | ||||||
1 | 2 | 90 | 2687,5 | 75,92 | 180 | 0,42 |
2 | 2 | 80 | 2500 | 66,92 | 160 | 0,42 |
3 | 2 | 70 | 2312,5 | 52,92 | 140 | 0,38 |
4 | 2 | 60 | 2000 | 41,92 | 120 | 0,35 |
5 | 2 | 50 | 1650 | 30,92 | 100 | 0,31 |
Характеристики регулирования скорости вращения при
изменении напряжения.
M2= M2N


 |

M2=0.5*M2N




3.Снятие характеристик регулирования скорости.








1.Шунтирование
обмотки возбуждения.
n=f (aB)
; M2=const ; Uя=90 B. P2,Iя,P,If,n,ζ
= f (aB).
Таблица
№3.
Измерено. | Вычислено. | |||||||||||
№ | Iя | Iшов | n | IВ | aB | P1 | P2 | ζ | DPшов | Pэл1 | Pст+Рм | ∑P |
A | A | Об/мин | – | Вт | Вт | – | Вт | Вт | Вт | Вт | ||
1 | 2,5 | 0,2 | 2375 | 2,3 | 0,08 | 225 | 122 | 0,54 | 0,13 | 40,7 | 62 | 103 |
2 | 2,75 | 0,6 | 2437 | 2,15 | 0,22 | 247 | 131 | 0,53 | 1,19 | 49,3 | 66 | 117 |
3 | 3 | 1 | 2487 | 2,0 | 0,33 | 270 | 141 | 0,52 | 3,32 | 58,7 | 67 | 129 |
4 | 3,4 | 1,8 | 2525 | 1,6 | 0,53 | 306 | 151 | 0,49 | 10,7 | 75,4 | 68 | 154 |
5 | 3,7 | 2,35 | 2550 | 1,35 | 0,63 | 333 | 156 | 0,47 | 18,3 | 89,3 | 69 | 176 |
Характеристики регулирования скорости вращения при
изменении величины магнитного потока.




2.Шунтирование
обмотки якоря.
M2=const ; Uя=90
B. P`1 ,P2,Iя,P1,
,n,ζ,Ic,Iшя,Iв = f (aя).
Таблица
№4.
Измерено. | Вычислено. | |||||||||||
№ | Iя | Iшов | n | Ic | aя | P1 | P2 | ζ | P`1 | Pст | Pэл | ∑P |
A | A | Об/мин | A | – | Вт | Вт | – | Вт | Вт | Вт | Вт | |
1. | 2,5 | 2,3 | 1650 | 4,8 | 0,92 | 432 | 144 | 0,327 | 225 | 43 | 40,75 | 83,75 |
2. | 2,4 | 2,8 | 1600 | 5,2 | 1,17 | 468 | 136 | 0,292 | 216 | 42 | 37,55 | 79,55 |
3. | 2,3 | 3,3 | 1575 | 5,6 | 1,43 | 504 | 131 | 0,261 | 207 | 42 | 34,49 | 75,49 |
4. | 2,25 | 3,55 | 1550 | 5,8 | 1,58 | 522 | 129 | 0,248 | 202,5 | 40 | 33,01 | 73,00 |
Характеристики регулирования скорости вращения при
изменении величины магнитного потока.






Расчетные формулы.
Iс=Iя+Iшя ; aя=Iшя / Iя ; P1=Uя* Ic ; P`1=
Uя* Iя ; n=nв / kтр ; kтр=0.04
В*мин. / об.










P2=P1 – ∑P = Uя*(Iя+Iшя) – Pэл1 – Pст – Pмех – DPшя ; DPшя=Uя*Iшя ;
Pэл1=I2я*(Rя+Rдп+Rов) ; Rя+Rдп=3.2 Ом
; Rов=3.32
Ом.;
P2= Uя* Iя – Pэл1 – Pст – Pмех ; ζ=P2 / P1 .
Выводы по проделанной работе.
Отличительной
особенностью СД является зависимость магнитного потока от тока якоря.Ф=Fов=2*Ia*Wов=Iа . (нелинейный участок кривой намагничивания).
СД
нельзя допускать в режим холостого хода. Скорость вращения с уменьшением
нагрузки на валу резко увеличивается, что приводит к опасному для механической
прочности электродвигателя исходу.
При
пуске Ia – увеличивается и двигатель обладает пусковым
моментом, что важно для привода. Для получения номинального режима, при снятии
рабочих характеристик,. необходимо
после пуска двигателя в ход установить номинальный момент двигателя,
необходимо
после пуска двигателя в ход установить номинальный момент двигателя,
регулируя
величину сопротивления R и Rр2 и
величину напряжения Uя .
Далее
момент нагрузки уменьшают до М2min=0,25*
МN ,уменьшение момента нагрузки
осуществляется
путем увеличения сопротивления цепи обмотки якоря машины.
У
двигателя с последовательным возбуждением ток Iв = Iя
.Принимая .что Ф=Iя
и
учитывая, что М=См*Ф*Iя ,
скорсть вращения может быть представлена в виде:
n ,т.е
Регулирование
скорости вращения возможно двумя способами:
1)
Изменением напряжения, подводимого
к якорю (Uя), т.е.
изменением Rap.
2)
Изменением величины магнитного
потока, т.е. изменением потока возбуждения:
а)
шунтированием О.В, которое приводит к уменьшению магнитного потока, а
следовательно к увеличению скорости вращения:
n≈;
, где
б)
шунтированием о.я
Краткая история создания
Первопроходцем в истории создания электрических двигателей стал М.Фарадей. Создать полноценную рабочую модель он не смог, зато именно ему принадлежит открытие, которое сделало это возможным. В 1821 году он провел опыт с использованием заряженной проволоки, помещенной в ртуть в ванную с магнитом. При взаимодействии с магнитным полем металлический проводник начинал вращаться, превращаю энергию электрического тока в механическую работу. Ученые того времени работали над созданием машины, работа которой основывалась бы на этом эффекте. Они хотели получить двигатель, работающий по принципу поршневого, то есть, чтобы рабочий вал двигался возвратно-поступательно.
В 1834 году был создан первый электрический двигатель постоянного тока, который разработал и создал русский ученый Б.С.Якоби. Именно он предложил заменить возвратно-поступательное движение вала его вращением. В его модели два электромагнита взаимодействовали между собой, вращая вал. В 1839 году он же успешно испытал лодку, оснащенную ДПТ. Дальнейшая история этого силового агрегата, по сути – это совершенствование двигателя Якоби.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.

Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения реализует третий подход к регулированию и интересен тем, что ОВ и М питаются от разных источников, схема его представлена ниже.
Обмотки простейшего электромотора параллельного независимого возбуждения
Для моторов в данном конструктивном исполнении Iв устанавливается неизменным, а меняется только напряжение, приложенное к М. Это сопровождается изменением числа оборотов на холостом ходу, но жесткость характеристики изменений не претерпевает.
Принцип работы такого агрегата за счет независимого функционирования двух источников оказывается более сложным. Однако, его применение дает такие важные для практики преимущества как
- плавное экономичное управление скоростью функционирования с большой глубиной,
- пуск мотора при пониженном напряжении без реостата.
В случае, если пуск происходит на нормальном напряжении, реостат ограничивает величину Iв.
Исследование показывает, что максимальное количество оборотов ограничено только сопротивлением М, а минимальное условиями отвода выделяемого тепла в процессе работы.
Характеристики в части энергопотребления и скорости срабатывания управляющей системы улучшаются в случае последовательного включения с М различных тиристорных регуляторов. Для установки числа оборотов вала и их стабилизации в процессе приведения в движение различных механизмов находят применение различные способы. Их общим характерным признаком является включение тиристорного регулятора в цепь частотной отрицательной обратной связи. Пуск такого агрегата требует реализации специальных процедур.
Преобразование энергии
На рисунке 5 показаны направления действия механических и электрических величин в якоре генератора и двигателя постоянного тока.
Рисунок 5. Направление э. д. с., тока и моментов в генераторе (а) и двигателе (б) постоянного тока
Согласно первому закону Ньютона в применении к вращающемуся телу, действующие на это тело движущие и тормозные вращающие моменты уравновешивают друг друга. Поэтому в генераторе при установившемся режиме работы электромагнитный момент
| Mэм = Mв – Mтр – Mс, | (7а) |
где Mв – момент на валу генератора, развиваемый первичным двигателем, Mтр – момент сил трения в подшипниках, о воздух и на коллекторе электрической машины, Mс – тормозной момент, вызываемый потерями на гистерезис и вихревые токи в сердечнике якоря. Эти потери мощности появляются в результате вращения сердечника якоря в неподвижном магнитном поле полюсов. Возникающие при этом электромагнитные силы оказывают на якорь тормозящее действие и в этом отношении проявляют себя подобно силам трения.
В двигателе при установившемся режиме работы
| Mэм = Mв + Mтр + Mс, | (7б) |
где Mв – тормозной момент на валу двигателя, развиваемый рабочей машиной (станок, насос и т. п.).
В генераторе Mэм является тормозным, а в двигателе – вращающим моментом, причем в обоих случаях Mв и Mэм противоположны по направлению.
Развиваемая электромагнитным моментом Mэм мощность Pэм называется электромагнитной мощностью и равна
| Pэм = Pэм × Ω, | (8) |
где
| Ω = 2 × π × n, | (9) |
представляет собой угловую скорость вращения.
Подставим в выражение (8) значение Mэм и Ω из равенств (5) и (9) и учтем, что линейная скорость на окружности якоря
Тогда получим
| Pэм = 2 × B × l × Dа × Iа × π × n = 2 × B × l × v × Iа |
или на основании выражения (1)
| Pэм = Eа × Iа. | (10) |
В обмотке якоря под действием э. д. с. Eа и тока Iа развивается внутренняя электрическая мощность якоря
| Pа= Eа × Iа. | (11) |
Согласно равенствам (10) и (11), Pэм = Pа, т. е. внутренняя электрическая мощность якоря равна электромагнитной мощности, развиваемой электромагнитным моментом, что отражает процесс преобразования механической энергии в электрическую в генераторе и обратный процесс в двигателе.
Умножим соотношения (3) и (6) на Iа. Тогда для генератора будем иметь
| Uа × Iа = Eа × Iа – Iа2 × rа | (12) |
и для двигателя
| Uа × Iа = Eа × Iа + Iа2 × rа. | (13) |
Левые части этих выражений представляют собой электрические мощности на зажимах якоря, первые члены правых частей – электромагнитную мощность якоря и последние члены – электрические потери мощности в якоре.
Приведенные соотношения действительны и при более сложной обмотке якоря, так как э. д. с. и моменты отдельных проводников складываются. Эти соотношения являются выражением закона сохранения энергии и отражают процесс преобразования энергии в машине постоянного тока.
Согласно им механическая мощность, развиваемая на валу генератора первичным двигателем, за вычетом механических и магнитных потерь, превращается в электрическую мощность в обмотке якоря, а электрическая мощность за вычетом потерь в этой обмотке выдается во внешнюю цепь. В двигателе электрическая мощность, подводимая к якорю из внешней цепи, частично расходуется на потери в обмотке якоря, а остальная часть этой мощности превращается в мощность электромагнитного поля и последняя – в механическую мощность, которая за вычетом потерь на трение и потерь в стали якоря передается рабочей машине.
Установленные выше применимо к машине постоянного тока общие закономерности превращения энергии в равной степени относятся также к машинам переменного тока.
Принцип работы
На провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами.
Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным
В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора
Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Устройство и принцип работы
ДПТ по своему строению напоминает синхронный электродвигатель переменного тока, разница между ними только в типе потребляемого тока. Двигатель состоит из неподвижной части – статора или индуктора, подвижной части – якоря и щеточноколлекторного узла. Индуктор может быть выполненным в виде постоянного магнита, если двигатель маломощный, но чаще он снабжается обмоткой возбуждения, имеющей два или больше полюса. Якорь состоит из набора проводников (обмоток), закрепленных в пазах. В простейшей модели ДПТ использовались только один магнит и рамка, по которой проходил ток. Такую конструкцию можно рассматривать только в качестве упрощенного примера, тогда как современная конструкция – это усовершенствованный вариант, имеющий более сложное устройство и развивающий необходимую мощность.Принцип работы ДПТ основан на законе Ампера: если в магнитное поле поместить заряженную проволочную рамку, она начнет вращаться. Ток, проходя по ней, образует вокруг себя собственное магнитное поле, которое при контакте с внешним магнитным полем начнет вращать рамку. В случае с одной рамкой вращение будет продолжаться, пока она не займет нейтральное положение параллельно внешнему магнитному полю. Чтобы привести систему в движение, нужно добавить еще одну рамку. В современных ДПТ рамки заменены якорем с набором проводников. На проводники подается ток, заряжая их, в результате чего вокруг якоря возникает магнитное поле, которое начинает взаимодействовать с магнитным полем обмотки возбуждения. В результате этого взаимодействия якорь поворачивается на определенный угол. Далее ток поступает на следующие проводники и т.д.
Для попеременной зарядки проводников якоря используются специальные щетки, выполненные из графита или сплава меди с графитом. Они играют роль контактов, которые замыкают электрическую цепь на выводы пары проводников. Все выводы изолированы между собой и объединены в коллекторный узел – кольцо из нескольких ламелей, находящееся на оси вала якоря. Во время работы двигателя щетки-контакты поочередно замыкают ламели, что дает возможность двигателю вращаться равномерно. Чем больше проводников имеет якорь, тем более равномерно будет работать ДПТ.Двигатели постоянного тока делятся на:
— электродвигатели с независимым возбуждением;
— электродвигатели с самовозбуждением (параллельные, последовательные или смешанные).
Схема ДПТ с независимым возбуждением предусматривает подключение обмотки возбуждения и якоря к разным источникам питания, так что между собой они не связаны электрически.
Параллельное возбуждение реализовывается путем параллельного подключения обмоток индуктора и якоря к одному источнику питания. Двигатели этих двух типов обладают жесткими рабочими характеристиками. У них частота вращения рабочего вала не зависит от нагрузки, и ее можно регулировать
Такие двигатели нашли применение в станках с переменной нагрузкой, где важно регулировать скорость вращения вала
При последовательном возбуждении якорь и обмотка возбуждения подключены последовательно, поэтому значение электрического тока у них одинаковое. Такие двигатели более «мягкие» в работе, имеют больший диапазон регулирования скоростей, но требуют постоянной нагрузки на вал, иначе скорость вращения может достичь критической отметки
У них высокое значение пускового моменты, что облегчает запуск, но при этом скорость вращения вала зависит от нагрузки. Применяются они на электротранспорте: в кранах, электропоездах и городских трамваях.
Смешанный тип, при котором одна обмотка возбуждения подключается к якорю параллельно, а вторая – последовательно, встречается редко.
СПОСОБЫ ВОЗБУЖДЕНИЯ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Под возбуждением электродвигателей постоянного тока (ПТ) понимается эффект создания в них ЭДС, обеспечивающей вращение ротора. Их рабочие характеристики зависят от того, каким образом включена обмотка возбуждения (ОВ) по отношению к цепи якоря.
Наиболее распространены следующие схемы подключения:
- с независимым возбуждением (две обмотки не связаны одна с другой, а ОВ питается от отдельного источника);
- с параллельным возбуждением или шунтируемого типа (в них ОВ включена параллельно якорной цепочке);
- с последовательным возбуждением (ОВ включается последовательно с якорной обмоткой).
В ряде случаев, связанных с особенностями эксплуатации двигателей постоянного тока, применяется комбинированная схема включения.
Иногда ее называют “смешанной” или “компаундной” (в ней последовательное подключение совмещается с параллельным). Рассмотрим каждый из перечисленных вариантов более подробно.
Независимое возбуждение.
При этой схеме подключения обмотка возбуждения электрически не связана с катушкой якоря (рис.1). Для снижения тепловых потерь и создания необходимой величины ЭДС число витков в ней делается достаточно большим, что позволяет снизить ток возбуждения.
Регулировать ток в якоре можно посредством резистора Rдоб, включенного последовательно. Частоту вращения можно менять резистором Rрег. Возможность независимого управления параметрами двигателя относят к плюсам этой схемы.
Ее минус – необходимость использования дополнительного источника питания, что приводит к увеличению материальных издержек. Применение схемы с независимым возбуждением определяется особенностями конструкции управляемого электропривода.
Параллельное возбуждение.
Электрическая схема подключения с параллельным возбуждением в целом напоминает рассмотренную выше. Ее особенность – наличие электрической связи ОВ с якорной цепью (рис.2).
Эффективность работы двух рассмотренных схем практически одинакова. Преимущество этого способа включения в том, что в данной ситуации отпадает необходимость в дополнительном источнике питания. Ее минус – невозможность раздельной регулировки параметров электродвигателя.
Принцип работы электродвигателя с последовательным возбуждением.
Особенностью этой схемы является последовательное включение ОВ и якорной цепочки (рис.3). При таком варианте подключения ток якоря является одновременно и током возбуждения (Iя =Iв). Это вынуждает производителей оборудования наматывать ОВ проводом того же сечения, что и у якоря.
Недостаток этой схемы – в том, что скорость двигателя зависит от нагрузки на валу. При ее увеличении падение напряжения на обмотках и магнитный поток возрастают. А это приводит к сильному падению скорости вращения. При снижении нагрузки частота вращения двигателя резко возрастает и может достичь опасных значений (он может начать работать “вразнос”).
Данный вариант применяют в случаях, когда необходимо выдерживать большое пусковое усилие (момент). Или же когда двигателю предстоит работать в режиме кратковременных перегрузок. Схемы с последовательным запуском используются в тяговых двигателях (в метро, трамваях, электровозах и троллейбусах).
Принцип действия двигателя со смешанным возбуждением.
К каждому из полюсов системы со смешанным возбуждением подключено две обмотки: последовательная и параллельная (рис.4). Их допускается включать таким образом, чтобы магнитные потоки суммировались (согласное подключение), либо вычитались один из другого (встречное включение).
В зависимости от того, как соотносятся части каждого из магнитных потоков, двигатель постоянного тока со смешанным возбуждением приближаются по своим свойствам к одному из уже рассмотренных ранее вариантов.
Такие схемы применяются в ситуациях, когда необходим большой по величине пусковой момент и одновременно невозможно обойтись без регулировки частоты вращения вала при переменных нагрузках.
Торможение двигателей постоянного тока
Виды электрического торможения. Электрические двигатели, как правило, используют не только для вращения механизмов, но и для их торможения. Электрическое торможение позволяет быстро остановить механизм или уменьшить его частоту вращения без применения механических тормозов.
Различают три вида электрического торможения двигателей постоянного тока: 1) рекуперативное торможение — генераторное торможение с отдачей электрической энергии в сеть; 2) динамическое или реостатное торможение — генераторное торможение с гашением выработанной энергии в реостате, подключенном к обмотке якоря; 3) электромагнитное торможение — торможение противовключением.
Во всех указанных режимах электромагнитный момент М воздействует на якорь в направлении, противоположном и, т. е. является тормозным.
Рекуперативное торможение. Двигатель с параллельным в озбуждением переходит в режим рекуперативного торможения при увеличении его частоты вращения и выше п0 = U/ceФ. В этом случае ЭДС машины становится больше напряжения сети и ток согласно (8.80) изменяет свое направление, т. е. двигатель переходит в генераторный режим. В этом режиме машина создает тормозной момент, а выработанная электрическая энергия отдается в сеть и может быть полезно использована.
В машине с параллельным возбуждением (рис. 8.71, а) механические характеристики генераторного режима являются продолжением механических характеристик двигательного режима в область отрицательных моментов.
Рис. 8.71. Схема и механические характеристики машины постоянного тока в двигательном и генераторном режимах.
Динамическое торможение. При этом виде торможения двигателя с параллельным возбуждением обмотку якоря отключают от сети и присоединяют к ней реостат Rдо6 (рис. 8.72, а) При этом машина работает как генератор, создает тормозной момент, но выработанная электрическая энергия бесполезно гасится в реостате. Регулирование тока Ia = Е/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб, подключенного к обмотке якоря.
Рис. 8.72. Схема и механические характеристики двигателя с параллельным возбуждением в режиме динамического торможения.
Электромагнитное торможение. В этом режиме изменяют направление электромагнитного момента М, сохраняя неизменным направление тока из сети, т. е. момент делают тормозным. Последнее осуществляют так же, как и при изменении направления вращения двигателя — путем переключения проводов, подводящих ток к обмотке якоря (рис. 8.76, а) или к обмотке возбуждения. Чтобы ограничить значение тока в этом режиме, в цепь обмотки якоря вводят добавочное сопротивление Rдоб. Регулирование тока Ia = (U + Е)/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб или ЭДС Е (тока возбуждения Iв). Механические характеристики в этом режиме для двигателей с параллельным и последовательным возбуждением показаны на рис. 8.76, б и в.
Рис.8.76. схема и механические характеристики двигателей в режиме электромагнитного торможения.
21.Универсальные коллекторные двигатели — это электродвигатели малой мощности последовательного возбуждения с секционированной обмоткой возбуждения, благодаря чему они могут работать как на постоянном, так и на переменном стандартных напряжениях примерно с одинаковыми свойствами и характеристиками. Такие электродвигатели используют для привода маломощных быстроходных устройств и многих бытовых приборов. Они допускают простое, широкое и плавное регулирование скорости.
По своему устройству эти двигатели отличаются от двигателей постоянного тока общего применения конструкцией статора, магнитную систему которого собирают из топких изолированных друг от друга листов электротехнической стали с выступающими полюсами, на которых размещают по две секции обмотки возбуждения. Эти секции соединяют последовательно с якорем и располагают по обе стороны от его выводов, что снижает радиопомехи от ценообразования на коллекторе под щетками, которое при питании двигателя от сети переменного напряжения особенно усиливается из-за существенного ухудшения условий коммутации.
Источник
Электродвигатели постоянного тока
Электрическая мощность в моторе преобразуется в механическую, заставляющую его вращаться, а часть этой мощности расходуется на нагревание проводника. Конструкция двигателя электрического постоянного тока включает якорь и индуктор, которые разделяют воздушные зазоры. Индуктор, состоящий из добавочных и главных полюсов, и станины, предназначен для создания магнитного поля. Якорь, собранный из отдельных листов, обмотка рабочая и коллектор, благодаря которому постоянный ток подводится к рабочей обмотке, образуют магнитную систему. Коллектор – это насаженный на вал двигателя цилиндр, собранный из изолированных друг от друга медных пластин. К его выступам припаиваются концы обмотки якоря. Ток с коллектора снимается при помощи щеток, закрепленных в определенном положении в щеткодержателях, благодаря чему обеспечивается нужный прижим на поверхность коллектора. Щетки с корпусом двигателя соединяются с помощью траверса.
Щетки, в процессе работы, скользят по поверхности вращающегося коллектора, переходя от одной его пластины к другой. При этом, в параллельных секциях обмотки якоря происходит изменение тока (когда щетка накоротко замыкает виток). Процесс этот называют коммутацией.
Под влиянием своего магнитного поля, в замкнутой секции обмотки возникает ЭДС самоиндукции, вызывающая появление дополнительного тока, который на поверхности щеток распределяет неравномерно ток, что приводит к искрению.
Два первых способа встречаются намного чаще третьего, ввиду его неэкономичности. Ток возбуждения регулируется при помощи любого устройства, у которого возможно изменять активное сопротивление (например, реостата). Регулирование при помощи изменения напряжения требует наличие источника постоянного тока: преобразователя или генератора. Такое регулирование применяют во всех промышленных электроприводах.



![§ 139. электродвигатель с последовательным возбуждением [1970 кузнецов м.и. - основы электротехники]](https://ledsshop.ru/wp-content/uploads/a/7/3/a7399ce97b1596442b0d680a10d2e331.jpeg)










