Введение
Моторы постоянного тока нельзя подключать напрямую к Arduino. Это обусловлено тем, что пины не способны выдавать ток более 40 мА. Мотору же, в зависимости от нагрузки, необходимо несколько сотен миллиампер. Потому возникает потребность увеличения мощности. Делается это, как-правило, с помощью транзисторов.
В статье «Транзисторы: принцип работы и чем они отличаются» можно ознакомиться с основными типами транзисторов и их принципами работы.
Так же рекомендуется посмотреть: Видеоуроки по Arduino, 5-я серия — Моторы и транзисторы. В данном уроке Джереми Блюм рассказывает о подключении мотора постоянного тока к Arduino через биполярный транзистор.
ШИМ технология
Импульсная методология лежит в основе многих способов регулирования напряжения в электрических двигателях постоянного тока, в частности Н-мостовой. В свою очередь методика относится к Ардуино Uno. Широтно-импульсная модуляция, суть которой состоит в том, чтобы подача напряжения питания осуществлялась в форме импульсов. Параллельно с этим частота поступления импульсов находится на постоянном уровне, в то время, как длительность может изменяться.
Сигналы здесь связаны с уровнем заполнения
Показатель представляет собой противоположность скважности — отношение периода подачи импульсов к его продолжительности. Формула выглядит вот так:
D = (t/T)*100%
В ситуациях, когда кнопка нажата на положение «ВКЛ», электродвигатель начинает свои вращения и будет их продолжать до тех пор, пока клавиша не будет выключена. Это происходит, когда кнопка постоянно находится в «нажатом» состоянии. Когда же клавиша задействуется всего на 8 мс из общей длительности цикла 10 мс, тогда силовой агрегат не будет максимально получать все напряжение из батареи на 9В. В такой ситуации среднеквадратический уровень напряжения, которое получит двигатель, не превысит показатель в 7 вольт. Как вы уже поняли, в этом случае двигатель будет вращаться медленнее, чем когда кнопка будет в нажатом положении всегда.
 Общий принцип ШИМ
Общий принцип ШИМ
Именно поэтому, коэффициент заполнения ШИМ или цикл занятости будет равен 80%. Расчет осуществляется путем деления показателя времени во включенном состоянии на сумму времени рабочего состояния и выключенного:
8/(8+2)=80%.
Схема генерации
Всего, существует несколько эффективных схем генерации этого ШИМ импульса. Одна из простейших – это схема, включающая специальный таймер. Для ее реализации необходимо иметь минимальное количество компонентов, а также нет необходимости проводить настройку. Время реализации – не более 1 часа.
Напряжение питания VCC схемы варьируется в пределах от 5 до 16 вольт. В роли диодов VD 1 – 3 могут применяться диоды почти любых типов. Сам же таймер включает разделитель тока, компараторы (2 шт), триггер, открытый коллектор (на ключе) и буфер на выходе.
Вывод для питания (VCC) и сбрасывания могут заводится под «+» питания, например, на + 5В. Заземление же идет на «минус». Транзисторный коллектор является открытым (на выводе) и подтягивается к «плюсу» питания посредством резистора, далее ШИМ сигнал с него снимается.
Крайние резисторные выводы подключаются к конденсаторам с помощью диодов. Само же устройство (конденсатор) при помощи второго вывода подключается на землю. Такая компоновка диодов обеспечивает зарядку конденсатора через первую, а разрядку через вторую часть резистора переменного срабатывания.
Требуемые компоненты

Самостоятельное подключение двигателя для реверсивного вращения не вызовет особых сложностей, если руководствоваться приведенной схемой. Одним из важных компонентов, который облегчит такую задачу является магнитный пускатель или контактор. На самом деле магнитный пускатель и контактор не являются тождественными понятиями. Если говорить просто, то контактор входит в состав магнитного пускателя, но для упрощения в статье оба понятия используются как равнозначные. Магнитные пускатели как раз и применяются для запуска, реверсивного движения и остановки асинхронных двигателей.

Возможно, возникает вопрос о том, почему нельзя использовать обычный рубильник или силовой автомат. В принципе, это допустимо, но не всегда пусковые токи, которые необходимы двигателю для нормального начала функционирования являются безопасными для человека. При включении может возникнуть пробой, который выведет из строя как выключатель, так и навредит оператору. Чтобы свести риски к минимуму, потребуется пускатель. В нем контактная часть отделена от той, с которой взаимодействует оператор. В нем есть отдельный модуль с катушкой, которая создает электромагнитное поле. Для работы катушки может потребоваться напряжение в 12 или больше вольт. При подаче этого напряжения происходит взаимодействие с металлическим сердечником, который втягивается внутрь катушки. К сердечнику закреплена пластина, которая уходит к контактной группе. Они замыкаются и происходит запуск двигателя. Остановка происходит в обратном порядке.
Кроме контактора, потребуется трехкнопочная станция. Одна клавиша выполняет функцию остановки, а две других функции запуска с разницей в направлении вращения. В трехкнопочной станции должно быть два нормально разомкнутых контакта и один нормально замкнутый. Если говорить просто, то нормальным положением контактора называется его нерабочее положение. То есть при воздействии на контакт он либо замыкается, либо размыкается. Если в рабочем состоянии он замкнут, то обозначается как НО, а если разомкнут, то обозначается как НЗ. Контакт НЗ применяется для кнопки остановки.
Аспекты проблем при управлении двигателем ПТ
 Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Наиболее важные проблемы управления представлены:
- обязательным присутствием гальванической развязки;
- плавным управлением мощностными показателями;
- отсутствием старт-стопного типа управления;
- контролированием перехода Zеrо — Сrоss;
- некоторыми особенностями подбора RC-фильтра snubbеr сглаживающего типа.
Важно помнить, что данная схемотехника отличается незначительной сложностью, при которой инициализация микроконтроллера требует достаточного количества времени, что обусловлено конкретно решаемыми задачами при нахождении выходных сигналов в третьем состоянии.
Управление при помощи MOSFET транзистора
МОSFЕТ (mеtаl-охidе-sеmiсоnduсtоr fiеld еffесt trаnsistоr) — полевые полупроводниковые триоды или метал-окисел-полупроводники p-канального типа открываются на затворе отрицательным напряжением по отношению к источнику. Диод паразитного типа в канальной структуре анода подсоединяется к части стока, а катод соединяется с истоком.
 Классическая схема включения MOSFET в ключевом режиме
Классическая схема включения MOSFET в ключевом режиме
Такой тип канала, как правило, подсоединяется таким образом, чтобы на сток приходились наиболее отрицательные показатели напряжения по сравнению с истоком.
MOSFET-транзисторы высокой степени мощности достаточно популярны, что обусловлено исключительно высокой переключательной скоростью в условиях низкого уровня мощности управления, прикладываемой к затвору.
Управление при помощи реле
Процесс управления достаточно мощным двигателем ПТ осуществляется посредством реле-модуля спаренного типа. Процесс подключения мотора к реле предполагает обязательный учет наличия трех выходных отверстий:
- NО (Nоrmаlly ореn) — нормально-разомкнутого типа;
- СОМ (Соmmоn) — общего типа;
- NС (Nоrmаlly сlоsеd) — нормально-замкнутого типа.
 Управление направлением вращения двигателя постоянного тока
Управление направлением вращения двигателя постоянного тока
Контактная группа устройства, преобразующего любой вид энергии в работу механического типа, подсоединяется к общим релейным контактам (СОМ). «Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
Реализация полного мостоуправления двигателя осуществляется при включении и выключении реле соответствующим образом.
При помощи H-моста
Управление двигателем посредством H-моста с управляющими логическими сигналами на входах и вращением в две стороны осуществляется несколькими вариантами Н-мостов:
- транзисторным H-мостом, простым в изготовлении и достаточно мощным. К недостаткам можно отнести риск короткого замыкания при подаче на два входа;
- двойным H-мостом, собранным на маломощной микросхеме. Минусы данного варианта представлены слишком малой мощностью и необходимостью подключения вывода Е на питании к «плюсу»;
- одиночным Н-мостом, собранным на микросхеме, что обеспечивает подачу единички на два входа и может стать причиной торможения работы двигателя.
 Транзисторный Н-мост
Транзисторный Н-мост
Самым простым вариантом станет сборка Н-моста на МОSFЕT-транзисторах. Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Известно множество вариантов микросхем, используемых для управления двигателем, включая ТLЕ4205 и L298D, а также стандартные электромагнитные реле, но перечисленные выше способы относятся к категории самых доступных.
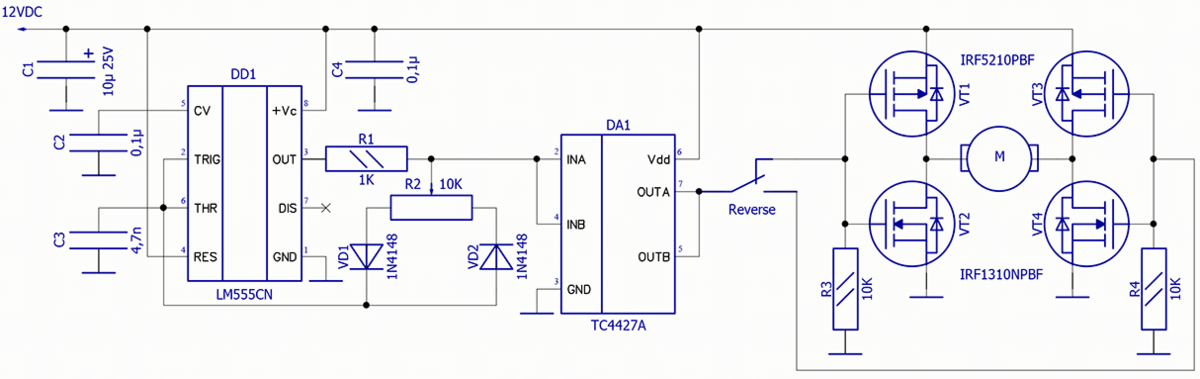
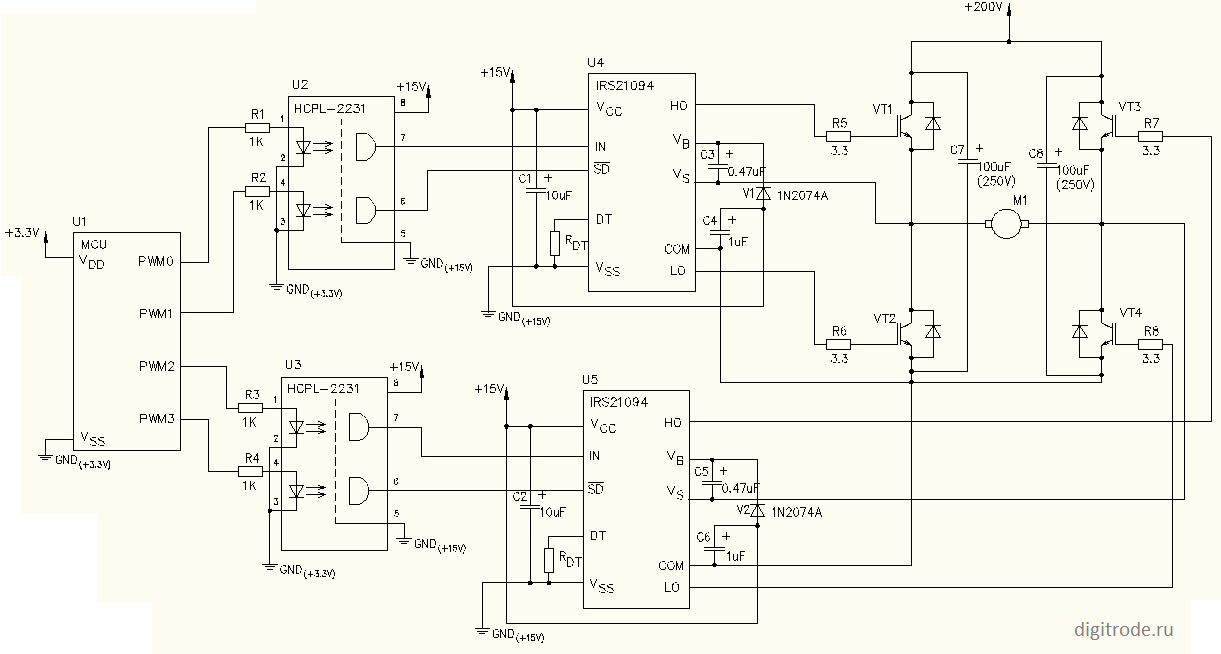
РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ
Всем привет, наверно многие радиолюбители, также как и я, имеют не одно хобби, а несколько. Помимо конструирования электронных устройств занимаюсь фотографией, съемкой видео на DSLR камеру, и видео монтажом. Мне, как видеографу, был необходим слайдер для видео съемки, и для начала вкратце объясню, что это такое. Ниже на фото показан фабричный слайдер.










Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры. Он являются аналогом рельсовой системы, которая используется в широкоформатном кино. С его помощью создается плавное перемещение камеры вокруг снимаемого объекта. Другим очень сильным эффектом, который можно использовать при работе со слайдером, – это возможность приблизиться или удалиться от объекта съемки. На следующем фото изображен двигатель, который выбрал для изготовления слайдера.

В качестве привода слайдера используется двигатель постоянного тока с питанием 12 вольт. В интернете была найдена схема регулятора для двигателя, который перемещает каретку слайдера. На следующем фото индикатор включения на светодиоде, тумблер, управляющий реверсом и выключатель питания.

При работе такого устройства важно, чтоб была плавная регулировка скорости, плюс легкое включение реверса двигателя. Скорость вращения вала двигателя, в случае применения нашего регулятора, плавно регулируется вращением ручки переменного резистора на 5 кОм
Возможно, не только я один из пользователей этого сайта увлекаюсь фотографией, и кто-то ещё захочет повторить это устройство, желающие могут скачать в конце статьи архив со схемой и печатной платой регулятора. На следующем рисунке приведена принципиальная схема регулятора для двигателя:
Прототип на базе микросхемы MC33035
Параллельно с разработкой контроллера на Ардуино я рассматривал альтернативные варианты логической части контроллера. И это привело меня к микросхеме MC33035. Это старая разработка от Motorola, сейчас её выпускает ON Semiconductor. Создана специально для мощных трёхфазных двигателей.

- Отвечает за всю логическую часть контроллера
- Считывает показания с датчиков Холла
- Определяет положения вала
- Выдаёт сигналы для затворов Н-моста на их драйверы
- Имеет возможность подключения индикатора ошибок, перегрева
- Обрабатывает и передает ШИМ-сигнал (PWM)
- Осуществляет реверс (обратный ход колеса)
Одним словом, микросхема содержит всё необходимое для управления электродвигателем. Её стоимость очень низкая: на Алиэкспрессе — около 50 рублей. Для сборки полноценного контроллера на её основе потребуется микросхема MC33035, полумостовые драйверы и Н-мост из полевых транзисторов. Я также собрал контроллер на этой микросхеме. Работает отлично, стабильно, колесо крутится как надо на различных оборотах. Но функционал микросхемы ограничен, если необходимо наворотить различные функции, вывод на дисплей скорости, одометр, расход батареи, то опять же возникает необходимость дополнительно подключить Ардуино или что-то аналогичное.
Схема с MC33035
Главное преимущество контроллера на базе MC33035 — это простота в использовании. Просто покупаете микросхему, собираете Н-мост, спаиваете всё на плату с небольшой обвязкой — и контроллер готов. Если нужно просто запустить двигатель с ШИМ-сигналом и управлять им — оптимальный вариант.
Контроллер на базе Ардуино — вариант сложнее, понадобится писать логику, обеспечивать дополнительные защиты контроллера. Но для экспериментов, прототипов, дополнительного функционала, использования различных режимов работы двигателя — подходящий вариант. Поэтому я решил пока отложить MC33035 и продолжить работу с Ардуино.
Принцип работы
Работа двигателя заключается в том, что контроллер коммутирует определённое количество обмоток статора таким образом, что вектор магнитных полей ротора и статора ортогональны. При помощи ШИМ (широтно-импульсной модуляции) контроллер совершает управление протекающим через двигатель током и регулирует момент, оказывающий воздействие на ротор. Направление этого действующего момента определяет отметка угла между векторами. При расчётах используются электрические градусы.
В такой ситуации результирующий вектор сдвигается и становится неподвижным по отношению к потоку ротора, что, в свою очередь, создаёт необходимый момент на валу электродвигателя.
Реверсивное включение двигателей постоянного тока
Наиболее просто осуществить реверс двигателя постоянного тока, у которого статор с постоянными магнитами. Достаточно изменить полярность питания, чтобы ротор начал вращаться в обратную сторону.
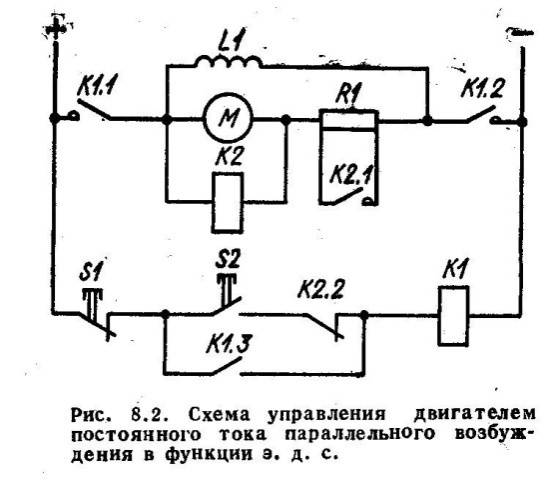
Сложнее осуществить реверсирование мотора с электромагнитным возбуждением (последовательным, параллельным). Если просто поменять полярность питающего напряжения, то направление вращения ротора не изменится. Чтобы изменить направление вращения, достаточно поменять полярность только в обмотке возбуждения или только на щетках ротора.
Для осуществления реверса двигателей большой мощности полярность следует менять на якоре. Разрыв обмотки возбуждения на работающем моторе может привести к неисправности, т.к. возникающая ЭДС имеет повышенное напряжение, которое способно повредить изоляцию обмоток. Что приведет к выходу электродвигателя из строя.
Для осуществления обратного направления вращения ротора применяют мостовые схемы на реле, контакторах или транзисторах. В последнем случае можно и регулировать скорость вращения.
На рисунке представлена схема на транзисторах. В качестве иллюстрации работы транзисторы заменены контактами переключателя. Аналогично выполняются мостовые схемы не на биполярных, а на полевых транзисторах.
КПД такой схемы значительно выше, чем на транзисторах. Управление осуществляется микроконтроллером или простыми логическими схемами, предотвращающими одновременную подачу сигналов.
Контроллеры двигателей
устройство управления двигателем
Микроконтроллер (мозг робота) задает скорость и направление двигателей. Но он не может управлять ими напрямую из-за его очень ограниченной мощности (тока и напряжения). С другой стороны, контроллер двигателя может обеспечивать ток при требуемом напряжении. При этом не может решить, как быстро двигатель должен вращаться.
Таким образом, микроконтроллер и контроллер двигателя должны работать вместе. Для того, чтобы моторы двигались так как нам нужно, используются устройства управления электродвигателями. Обычно микроконтроллер может подавать команду на контроллер двигателя о том, как приводить в действие двигатели с помощью стандартного и простого метода связи.
- Например, такого как UART (Universal asynchronous receiver/transmitter или УАПП — универсальный асинхронный приемопередатчик). Это один из самых старых и распространенных протоколов передачи данных.
- Возможно использование PWM (широтно-импульсную модуляцию — ШИМ).
- Кроме того, некоторые контроллеры двигателей могут управляться вручную аналоговым напряжением, обычно создаваемым потенциометром.
Физический размер и вес контроллера двигателя могут значительно различаться. От устройства, меньшего, чем кончик пальца, используемого для управления мини-сумо роботом до большого контроллера весом в несколько килограммов. Вес и размер контроллера двигателя обычно оказывает минимальное влияние на робота.
Хотя бывает необходимо сделать робота маленького размера или беспилотный летательный аппарат. В результате вес и размер контроллера может быть критичным. Размер контроллера двигателя обычно связан с максимальным током, который он может обеспечить. Увеличенный ток также означает необходимость использования проводов большего диаметра.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Такой тип двигателя обладает превосходными характеристиками, особенно при совершении управления посредством датчиков положения. Если момент сопротивления варьируется или вовсе неизвестен, а также при необходимости достижения более высокого пускового момента используется управление с датчиком. Если же датчик не используется (как правило, в вентиляторах), управление позволяет обойтись без проводной связи.
Особенности управления трёхфазным бесколлекторным двигателем без датчика по положению:
- расположение ротора определяют при помощи дифференциального АЦП (аналого-цифрового преобразователя);
- токовую перегрузку определяют также при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора;
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- рекомендуемыми микроконтроллерами считаются AT90PWM3 и ATmega64;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI.
Особенности управления трёхфазным бесколлекторным двигателем с датчиком по положению на примере датчика Холла:
- регулировку скорости выполняют при помощи подсоединённых к нижним драйверам ШИМ-каналов;
- выход каждого из датчиков Холла подключают к соответствующей линии ввода-вывода микроконтроллера, настроенной при изменениях состояния на генерацию прерываний;
- поддерживаемыми коммуникационными интерфейсами (интерфейсами связи) являются УАПП, SPI и TWI;
- токовую перегрузку определяют при помощи АЦП (аналого-цифрового преобразователя) либо аналогового компаратора.
Осуществление переключения и контроля двигателей
Данная разновидность двигателей имеет два режима: они могут быть включёнными, либо отключёнными. Такое переключение делается переключателями, реле, транзисторами или же МОП-транзисторами.
В схеме управления используется биполярный транзистор, он играет ключевую роль в переключении режимов.
Контроль скорости двигателя
Потому как скорость данной разновидности двигателей является пропорциональной напряжению на клеммах, можно использовать транзистор для регулирования напряжения на них. Эти два транзистора подключены как пара для управления током главного ротора.
Будет интересно Что такое асинхронный двигатель и принцип его действия
Регулировка скорости импульса
Скорость вращения данной разновидности электрических двигателей является пропорциональной среднему давлению на второй клемме.
Изменение направления движения двигателя постоянного тока
Есть много преимуществ в управлении скоростью данной разновидности электрических двигателей, но есть один большой недостаток: направление вращения всегда одно и то же. Во многих случаях машина действует по простому принципу, чтобы двигаться вперед и назад. H-мостовая схема двигателя.






Базовая конфигурация четырех переключателей, будь то электромеханические реле или транзисторы, аналогична букве Н с двигателем, расположенным на шине посередине.
Индуктивные нагрузки
При выборе индуктивной нагрузки, представленной двигателем, решение проблемы режима плавного управления мощностными показателями мотора не всегда дается легко, что зависит от нескольких факторов, представленных:
- мощностными показателями движка;
- инерционностью нагрузочного уровня вала;
- реактивными обмоточными показателями;
- активными обмоточными показателями.
 Управление двигателями постоянного тока
Управление двигателями постоянного тока
Оптимальным вариантом для решения практически всех перечисленных выше проблем является использование частотных инверторов.
Индуктивный тип схемы для управления двигателем ПТ не отличается особой сложностью по сравнению с частотным управлением, а также способен обеспечивать вполне приемлемую результативность.
Управление двигателем при помощи биполярного транзистора
Самый простой способ приведения в действие двигателя показан ниже:

Биполярный транзистор используется в качестве переключателя. Резистор R необходимо подобрать таким, чтобы в худшем случае (потенциал базы равен потенциалу эмиттера) через него протекал ток, не превышающий максимальный ток порта микроконтроллера.
Для того чтобы подобрать подходящий транзистор, нам нужно знать максимальный ток во время пуска или остановки двигателя, и ток во время нормальной его работы. Исходя из этого, мы подберем транзистор с соответствующим током коллектора и его максимальное значение.
Следует также обратить внимание на мощность, выделяющуюся на транзисторе (P = Uкэ * Iк). Несмотря на то, что транзистор в данном случае работает в состоянии насыщения и напряжение Uкэ часто не превышает 1В, коллекторный ток все же велик (около 0,5 А для двигателя среднего размера) и, следовательно, мощность, излучаемая на транзисторе может потребовать от нас установки радиатора
Другой проблемой при применении биполярных транзисторов, может быть, слишком большой ток базы. Соотношение токов выходного сигнала к входному такого транзистора — это чаще всего 100 (это отношение называется коэффициентом усиления по току и обозначается или hfe ). Но, к сожалению, когда транзистор работает в состоянии насыщения, этот коэффициент сильно снижается.
Это приводит к тому, что если мы хотим, чтобы ток коллектора имел большое значение, это может потребовать большего тока, чем 20 мА, то есть больше, чем составляет нагрузочная способность порта микроконтроллера. В таких случаях решением может быть использование комбинации транзисторов – транзистор Дарлингтона:
Силиконовый коврик для пайки
Размер 55 х 38 см, вес 800 гр….
Подробнее

Такая система ведет себя как один транзистор с большим значением усиления тока и малой скоростью работы.
Несколько слов об индуктивных нагрузках
Поскольку двигатель является индуктивной нагрузкой, мы должны быть осторожны. Если через обмотку течет ток, и мы внезапно остановим этот поток, то на выводах обмотки временно появляется большое напряжение. Это напряжение может привести к повреждению транзистора (в представленной схеме выше) вызывая пробой перехода база-коллектор. Кроме того, это может создавать значительные помехи. Для предотвращения этого необходимо параллельно с индуктивной нагрузкой подключить диод:

Во время нормальной работы двигателя диод смещен в обратном направлении. Отключение питания электродвигателя вызывает нарастание напряжения на катушке, при этом диод будет смещен в прямом направлении, благодаря чему произойдет разряд излишней энергии накопленной в катушке.
Диод следует подобрать такой, чтобы он выдерживал обратное напряжение во время нормальной работы двигателя. Такую защиту можно применять как при использовании биполярных транзисторов, так и MOSFET. Так же рекомендуется использовать диод и в работе с электромагнитным реле, для предотвращения раннего износа контактов.
Шаговые двигатели
Шаговые двигатели (ШД) получили достаточно широкое распространение в системах автоматики и управления. Они являются еще одним типом бесколлекторных двигателей постоянного тока. Конструктивно ШД состоят из статора, на котором размещены обмотки возбуждения, и ротора, выполненного из магнитных материалов. Шаговые двигатели с магнитным ротором позволяют обеспечить больший крутящий момент и жесткую фиксацию ротора при обесточенных обмотках.
В процессе вращения ротор ШД перемещается шагами под управлением подаваемых на обмотки статора импульсов питания. Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме. Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи. Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования (величина шага) зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов.
В зависимости от конфигурации схемы подключения обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет в каждой из двух фаз единую обмотку для обоих полюсов статора, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Для управления таким ШД требуется мостовой драйвер или полумостовая схема с 2-полярным питанием. При биполярном управлении одновременно работают две обмотки и крутящий момент примерно на 40% больше. На рисунке 7 представлена последовательность сигналов управления при вращении биполярного ШД.

Рис. 7. Последовательность сигналов управления биполярным ШД
Униполярный двигатель использует в каждой фазе одну обмотку со средним выводом и позволяет использовать более простую схему управления с одним ключом на каждую из четырех полуобмоток.
Четырех обмоточные ШД могут использоваться как в биполярной, так и в униполярной конфигурации.
При протекании тока по одной из катушек ротор стремится изменить положение так, чтобы противоположные полюса ротора и статора установились друг против друга. Для непрерывного вращения ротора катушки попеременно переключают.
На практике используются разные способы подачи питания на четыре обмотки статора. Чаще всего применяют попарное подключение с полношаговым или полушаговым режимом работы. В полношаговом режиме ротор с двумя полюсами, вращающийся в переключаемом магнитном поле двух пар катушек, может занимать четыре положения (рисунок 8).

Рис. 8. Полношаговый режим управления ШД
Получить удвоенную точность позиционирования и восемь позиций позволяет полушаговый режим работы (рисунок 9). Для его реализации добавляется промежуточный шаг с одновременной запиткой всех четырех катушек.

Рис. 9. Полушаговый режим управления ШД
Значительно увеличить количество промежуточных положений и точность позиционирования позволяет режим микрошага. Идея микрошага заключается в подаче на обмотки шагового двигателя вместо импульсов управления непрерывного сигнала, напоминающего по форме ступенчатую синусоиду (рисунок 10). Полный шаг в этом случае делится на маленькие микрошаги, а вращение становится более плавным. Режим микрошага позволяет получить наиболее точное позиционирование. Кроме того, в этом режиме значительно снижается присущая шаговым двигателям вибрация корпуса.

Рис. 10. Управление ШД в режиме микрошага
Современное применение и перспективы
Существует немало устройств, для которых увеличение времени безотказной работы имеет важнейшее значение. В подобном оборудовании применение БДКП всегда оправданно, несмотря на их сравнительно высокую стоимость. Это могут быть водяные и топливные насосы, турбины охлаждения кондиционеров и двигателей и т. д. Бесщёточные моторы используются во многих моделях электрических транспортных средств

![Управление мотором постоянного тока с помощью одного транзистора [амперка / вики]](https://ledsshop.ru/wp-content/uploads/a/3/c/a3c1e6637cbdfdb7fe9d166ae62d605a.png)






В настоящее время на бесколлекторные двигатели всерьёз обратила внимание автомобильная промышленность
БДКП идеально подходят для малых приводов, работающих в сложных условиях или с высокой точностью: питатели и ленточные конвейеры, промышленных роботы, системы позиционирования. Существуют сферы, в которых бесколлекторные двигатели доминируют безальтернативно: жёсткие диски, насосы, бесшумные вентиляторы, мелкая бытовая техника, CD/DVD приводы. Малый вес и высокая выходная мощность сделали БДКП также и основой для производства современных беспроводных ручных инструментов.
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным
В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора
Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Типы контроллеров электромоторов
Существует несколько типов исполнительных механизмов (шаг 3). Следовательно, существует несколько типов контроллеров двигателей.
- Машинные контроллеры двигателя постоянного тока. Они используются с шестерёнчатыми двигателями постоянного тока, постоянного тока и многими линейными приводами.
- Бесщеточные контроллеры двигателя постоянного тока. Используются с бесщеточными двигателями постоянного тока.
- Сервомоторы: используются для хобби сервомоторов.
- Контроллеры шагового двигателя. Используются с однополярными или биполярными шаговыми двигателями в зависимости от их типа.
Управление двигателем при помощи MOSFET транзистора
Так же можно управлять постоянным двигателем с помощью полевого транзистора MOSFET:
Он должен быть с каналом обогащенного типа. Основным преимуществом такого транзистора является практически отсутствие входного тока. Он имеет небольшое активное сопротивление канала (доли ома), благодаря чему потери мощности в транзисторе не большие. Недостатком является чувствительность к электростатическим разрядам, которые могут вывести транзистор из строя.
Так как ток стока может достигать (для среднего транзистора) десятков ампер и, имея практически нулевой входной ток, MOSFET транзисторы отлично подходят в качестве усилителя мощности и часто являются лучшей альтернативой, чем биполярные. Они так же должны быть защищены диодами от индуктивных всплесков, так как это может привести к пробою между затвором и каналом (напряжение пробоя составляет несколько десятков вольт).
Заключение
Электродвигатели находят все более широкое применение в самом различном оборудовании, совершенствуются и получают новые возможности во многом благодаря современным системам электропривода.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами двигателей постоянного тока. На их основе компания предлагает масштабируемые в зависимости от требований по точности, мощности и функциональности решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
•••





